
Las instrucciones del contador de alta velocidad y de salida de pulsos se pueden utilizar en los siguientes PLCs de la serie FP: FP0, FP-e, FPS, FP-X, FP0R.
Control FPWIN Pro ofrece dos conceptos de programación diferentes de las instrucciones del contador de alta velocidad:
Instrucciones F
Instrucciones Tool
Cuándo se deben utilizar las instrucciones Tool en lugar de las instrucciones F?
Para desarrollar bloques de funciones universales para las librerías.
Cuando se tienen que programar diferentes tipos de PLCs de la serie FP.
Cuando la configuración de los bits del código de control y de las variables del canal es una tarea demasiado tediosa.
Sin embargo, las instrucciones F son más fáciles de utilizar para programadores nóveles y muy familiarizados con FPWIN GR.
Gran parte de la información, accesible a través de las funciones de información y control, se almacena en los relés y en los registros internos especiales. Estos relés y registros también pueden ser accedidos utilizando las variables del sistema independientes del PLC.Para optimizar la programación, se pueden utilizar las instrucciones de ambas librerías y así obtener las máximas ventajas de cada una.
Cuando se programa con las instrucciones de ayuda, consultar la información más detallada proporcionada por las instrucciones F.
Características principales |
Instrucciones F | Instrucciones Tool |
|---|---|---|
Pre versión 6.4 |
l |
|
Uso de las funciones inline |
l |
|
Uso de las nombres de funciones FPWIN GR |
l |
|
Menos código con los números de canal constantes |
l |
|
Códigos de Control |
l |
|
Funciones de control |
l |
|
Funciones de Información |
l |
|
Números de canal variables |
l |
|
Funciones universales para todos los PLCs |
l |
|
Para bloques de funciones universal de usuario |
l |
|
DUT común para la configuración de los canales para todos los PLCs y para todas las instrucciones de salida de pulsos |
l |
| Instrucciones F | Instrucciones Tool | ||
 |
 |
||
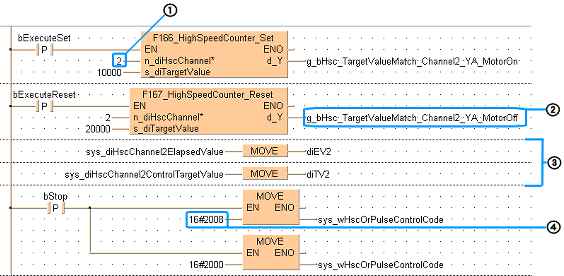
1) |
Solamente soporta números de canal constantes, en este ejemplo, el número de canal 2. |
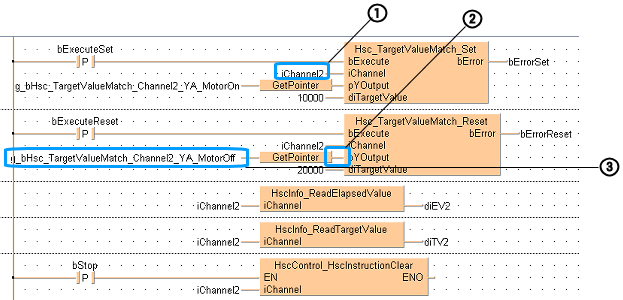
1) |
Soporta números de canal variables, en este ejemplo, el 2. |
2) |
Salida con las direcciones de usuario explícita en el área Y |
2) |
Acceso a las salidas con direcciones de usuario explícita a través de una variable puntero. Este puntero se puede aplicar a través de las entradas de los bloques de funciones de usuario. |
3) |
Las variables del sistema se utilizan para leer los registros especiales de datos para el canal 2. |
3) |
El nombre de la variable de salida g_bHsc_TargetValueMatch_Channel2_ YA_MotorOff debe cumplir un determinado patrón, consultar Hsc_TargetValueMatch_Set. |
4) |
Ajustes del código de control específicos de PLC, por ejemplo para resetear la instrucción del contador de alta velocidad. |
||
Conclusión:
|
Conclusión:
|
||
Utilizar las instrucciones del contador de alta velocidad para contar los pulsos generados por sensores o encoders y para poner las salidas a TRUE o FALSE una vez que se haya alcanzado el valor de preselección especificado.
Junto con un servomotor, las instrucciones de salida de pulsos permiten realizar operaciones de posicionamiento típicas como el control trapezoidal, la vuelta al origen, y la operación de JOG.
El número de canales del contador de alta velocidad integrado y de salida de pulsos, el rango de contaje, el número de entradas y salidas, así como las especificaciones de funcionamiento difieren dependiendo del tipo de PLC. Para obtener una información más detallada, consultar los manuales de hardware correspondientes.
Para utilizar el contador de alta velocidad: Seleccionar la entrada del contador de alta velocidad para el canal determinado en los registros del sistema.
Para especificar el modo de contaje, seleccionar las entradas del contador de alta velocidad en los registros del sistema.
Modo de entrada |
Señales de entrada |
|
|---|---|---|
Incremental |
 |
|
Decremental |
 |
|
Doble fase |
Contaje incremental  |
|
Contaje decremental  |
||
Incremental/decremental |
 |
|
(a) |
Incremento |
|
(b) |
Decremento |
|
Control incremental/decremental |
 |
|
(a) |
Incremento |
|
(b) |
Decremento |
|
Contador con entrada de reset (incremental) |
 |
|
(a) |
Flanco de subida: contaje deshabilitado, borrado del valor actual |
|
(b) |
Flanco de bajada: contaje habilitado |
|
(c) |
Contaje deshabilitado |
|
Una interrupción ejecuta el reset en (3), en (a) (el flanco de subida) y en (b) (el flanco de bajada) La entrada de reset se puede habilitar/deshabilitar utilizando el bit 2 de sys_wHscOrPulseControlCode. |
||
Los códigos de control se utilizan para ejecutar operaciones especiales de contaje.
Programación con instrucciones F:
Utilizar un instrucción MOVE para escribir en el código de control en o desde los registros especiales de datos reservados para este código (DT90052 ó DT9052, dependiendo del tipo de PLC).Para acceder al registro especial de datos que almacena el código de control del contador de alta velocidad y la salida de pulsos utilizar la variable del sistema sys_wHscOrPulseControlCode
Cuando se programa con las instrucciones Tool:
Utilizar las instrucciones de control del contador de alta velocidad y de salida de pulsos universales que sirven para configurar el código de control para todos los modelos de PLCs. Utilizar las instrucciones de información del contador de alta velocidad y de salida de pulsos para monitorizar la configuración del código de control.
El valor actual se almacena en una doble palabra en los registros especiales.
Programación con instrucciones F:
Acceder al registro especial de datos utilizando la variable del sistema sys_diHscChannelxElapsedValue (donde x=número de canal).
El número de canal es un parámetro de entrada del contador de alta velocidad o de la instrucción de salida de pulsos. El resto de los parámetros, por ejemplo, la velocidad y el valor de preselección (posición destino), se pueden especificar utilizando las DUTs predefinidas. Estas DUTs se pueden encontrar en la FP Library.
Cuando se programa con las instrucciones Tool:
Utilizar las instrucciones del contador de alta velocidad y de salida de pulsos universales que se son válidas para todos los tipos de PLCs para leer y escribir el valor actual.
El número de canal y los ajustes del código de control, por ejemplo, CW/CCW, control de valor absoluto o relativo, o ciclo de trabajo se especifican en una DUT de configuración de canal común a todos los tipos de PLC. Otros parámetros, como la velocidad y el valor objetivo, pueden aplicarse directamente a la instrucción.
El estado del contador de alta velocidad y de la salida de pulsos se almacena en relés internos especiales. Para acceder a los relés internos especiales, utilizar las variables del sistema independientes del PLC.
Cuando se ejecuta una instrucción del contador de alta velocidad, la bandera control del contador de alta velocidad (por ejemplo, sys_bIsHscChannel0ControlActive) del canal utilizado pasa a TRUE. No se puede ejecutar otra instrucción del contador de alta velocidad utilizando el mismo canal mientras que la bandera de control esté a TRUE.
Durante la salida de pulsos, la bandera de control (por ejemplo sys_bIsPulseChannel0Active) del canal correspondiente está a TRUE. No se puede ejecutar ninguna otra instrucción de salida de pulsos mientras esta bandera sea TRUE
FP-X, FP0R:
La bandera de control del contador de alta velocidad (por ejemplo sys_bIsHscChannel0ControlActive) y la bandera de control de la salida de pulsos (por ejemplo sys_bIsPulseChannel0Active) están asignadas a relés internos especiales diferentes.
FP-Sigma, FP0, FP-e:
La bandera de control del contador de alta velocidad (por ejemplo sys_bIsHscChannel0ControlActive) y la bandera de control de la salida de pulsos (por ejemplo sys_bIsPulseChannel0Active) están asignadas al mismo relé interno especial (R903A). Por lo tanto, cuando se ejecuta una instrucción del contador de alta velocidad o de salida de pulsos, tanto la bandera de control de contador de alta velocidad (por ejemplo sys_bIsHscChannel0ControlActive) como la bandera de control de la salida de pulsos (por ejemplo sys_bIsPulseChannel0Active) para el canal especificado, están a TRUE. No se puede ejecutar ninguna otra instrucción del contador de alta velocidad o de salida de pulsos mientras que está bandera esté a TRUE. El estado de la bandera de control del contador de alta velocidad o de la bandera de control de la salida de pulsos puede cambiar dentro del ciclo de scan. Por ejemplo, si el número de bytes recibidos se lee más de una vez, se pueden dar estados diferentes dentro de un ciclo de scan.
Para acceder a los registros y a los relés internos especiales, utilizar las variables del sistema independientes del PLC.