


 ATAN2_YX
ATAN2_YXDevuelve el ángulo φ de las coordenadas Cartesianas (x,y)
ATAN2_YX devuelven el ángulo j de las coordenadas cartesianas (x,y) dentro del rango de -π a +π.
Entrada
Coordenada cartesiana y
Coordenada cartesiana x
Salida
Cada posición P de las coordenadas bidimensionales puede definirse mediante coordenadas cartesianas P(x,y) o mediante coordenadas polares P(r,j) (r = radio, j = ángulo).

Determina ATAN2_YX del siguiente modo:
ATAN2_YX(y,x) |
x |
y |
|---|---|---|
 |
x > 0 |
|
 |
x < 0 |
y ³ 0 |
 |
y < 0 |
|
 |
x = 0 |
y > 0 |
 |
y < 0 |
|
0 |
y = 0 |
Instrucciones F correspondientes: F305_BATAN, F319_ATAN

Todas las variables de entrada y de salida utilizadas para la programación de esta función han sido declaradas en la Cabecera de la POU. Se utiliza la misma cabecera de la POU para todos los lenguajes de programación.
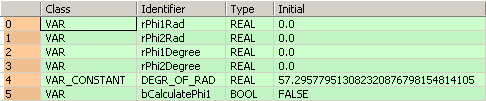
VAR
rPhi1Rad: REAL:=0.0;
rPhi2Rad: REAL:=0.0;
rPhi1Degree: REAL:=0.0;
rPhi2Degree: REAL:=0.0;
END_VAR VAR CONSTANT
DEGR_OF_RAD: REAL:=57.295779513082320876798154814105;
END_VAR
VAR
bCalculatePhi1: BOOL:=FALSE;
END_VAR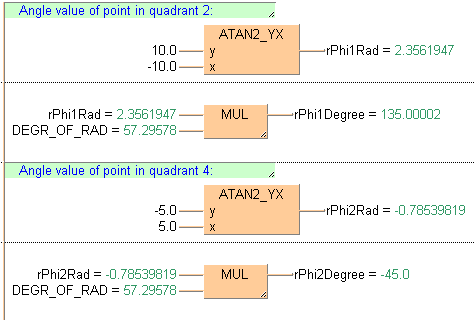
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 5 ;
NETWORK_BODY
B(B_F,ATAN2_YX!,Instance,13,1,20,5,,?Dy?Dx?C);
B(B_VARIN,,10.0,11,2,13,4,);
B(B_VARIN,,-10.0,11,3,13,5,);
B(B_VAROUT,,rPhi1Rad,20,2,22,4,);
B(B_COMMENT,,Angle value of point in quadrant 2:,1,0,18,1,);
L(1,0,1,5);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 5 ;
NETWORK_BODY
B(B_F,@MUL-2!,Instance,13,1,18,4,,?D?D?C);
B(B_VARIN,,rPhi1Rad,11,1,13,3,);
B(B_VARIN,,DEGR_OF_RAD,11,2,13,4,);
B(B_VAROUT,,rPhi1Degree,18,1,20,3,);
L(1,0,1,5);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 5 ;
NETWORK_BODY
B(B_F,ATAN2_YX!,Instance,13,1,20,5,,?Dy?Dx?C);
B(B_VARIN,,-5.0,11,2,13,4,);
B(B_VARIN,,5.0,11,3,13,5,);
B(B_VAROUT,,rPhi2Rad,20,2,22,4,);
B(B_COMMENT,,Angle value of point in quadrant 4:,1,0,18,1,);
L(1,0,1,5);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 5 ;
NETWORK_BODY
B(B_F,@MUL-2!,Instance,13,1,18,4,,?D?D?C);
B(B_VARIN,,rPhi2Rad,11,1,13,3,);
B(B_VARIN,,DEGR_OF_RAD,11,2,13,4,);
B(B_VAROUT,,rPhi2Degree,18,1,20,3,);
L(1,0,1,5);
END_NETWORK_BODY
END_NET_WORK
END_BODY(* Angle value of point in quadrant 2 *)
rPhi1Rad:=ATAN2_YX(y := 10.0, x := -10.0); (* Result: 2.3561947 *)
rPhi1Degree := rPhi1Rad * DEGR_OF_RAD; (* Result: 135.00002 *)
(* Angle value of point in quadrant 4 *)
rPhi2Rad:=ATAN2_YX(y := -5.0, x := 5.0); (* Result: -0.78539819 *)
rPhi2Degree := rPhi2Rad * DEGR_OF_RAD; (* Result: -45.0 *)