


 FP_ATAN2
FP_ATAN2Conversion des coordonnées en radians
Cette instruction FP renvoie l’angle j des coordonnées cartésiennes (x,y) dans l’intervalle de -π à +π.
Entrée
Coordonnée y cartésienne
Coordonnée x cartésienne
Sortie
Résultat en radians
Chaque position P des coordonnées à deux dimensions peut être définie par des coordonnées cartésiennes P(x,y) ou par des coordonnées polaires P(r,j) (r = rayon, j = angle).

Définissez FP_ATAN2 de la manière suivante :
ATAN2_YX(y,x) |
x |
y |
|---|---|---|
 |
x > 0 |
|
 |
x < 0 |
y ³ 0 |
 |
y < 0 |
|
 |
x = 0 |
y > 0 |
 |
y < 0 |
|
Erreur d’opération |
y = 0 |
Si la valeur spécifiée pour s1_y (coordonnée y) ou s2_x (coordonnée x) n’est pas un nombre réel
Si 0,0 est spécifié pour s1_y (coordonnée y) et 0,0 pour s2_x (coordonnée x)

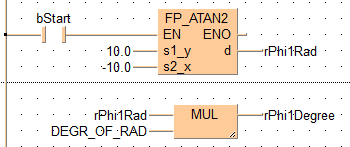
Toutes les variables d’entrée et de sortie utilisées pour programmer cette fonction ont été déclarées dans l’en-tête du POU. Le même en-tête de POU est utilisé pour tous les langages de programmation.

VAR
bStart: BOOL:=FALSE;
(*activates the instruction*)
rPhi1Rad: REAL:=0.0;
rPhi1Degree: REAL:=0.0;
END_VAR
VAR CONSTANT
DEGR_OF_RAD: REAL:=57.295779513082320876798154814105;
END_VAR
VAR
END_VARLa fonction est exécutée lorsque la variable bStart est définie sur TRUE.
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 6 ;
NETWORK_BODY
B(B_F,FP_ATAN2!,,10,1,16,6,,?DEN?Ds1_y?Ds2_x?AENO?Cd);
B(B_VARIN,,10.0,8,3,10,5,);
B(B_VARIN,,-10.0,8,4,10,6,);
B(B_VAROUT,,rPhi1Rad,16,3,18,5,);
B(B_CONTACT,,bStart,3,2,5,4,);
L(1,3,3,3);
L(5,3,10,3);
L(1,0,1,6);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 5 ;
NETWORK_BODY
B(B_F,@MUL-2!,,11,1,16,4,,?D?D?C);
B(B_VARIN,,rPhi1Rad,9,1,11,3,);
B(B_VARIN,,DEGR_OF_RAD,9,2,11,4,);
B(B_VAROUT,,rPhi1Degree,16,1,18,3,);
L(1,0,1,5);
END_NETWORK_BODY
END_NET_WORK
END_BODYrPhi1Rad:=ATAN2_YX(y := 10.0, x := -10.0); (* Result: 2.3561947 *)
rPhi1Degree := rPhi1Rad * DEGR_OF_RAD; (* Result: 135.00002 *)