


 F113_WBSL
F113_WBSLDécalage à gauche d’un digit hexadécimal (4 bits) d’une zone de données de 16 bits
Décale un digit hexadécimal (4 bits) de la zone de données spécifiée par d1 (début) et d2 (fin) vers la gauche (décalage en direction du digit de poids fort) lorsque le déclencheur EN est TRUE.
Sortie
Adresse de départ de la zone de 16 bits
Adresse de fin de la zone de 16 bits
Lorsqu’un digit hexadécimal (4 digits) est décalé vers la gauche :
Les données dans le digit hexadécimal de poids fort (positions du bit 12 à 15) de la zone de données de 16 bits spécifiée par d2 sont décalées.
Les données dans le digit hexadécimal de poids faible (positions du bit 0 à 3) de la zone de données de 16 bits spécifiée par d1 prennent la valeur 0.
d1 et d2 doivent être :
Le même type d’opérande
d1 £ d2
Les variables d1 et d2 doivent être du même type de données.


Toutes les variables d’entrée et de sortie utilisées pour programmer cette fonction ont été déclarées dans l’en-tête du POU. Le même en-tête de POU est utilisé pour tous les langages de programmation.

VAR
start: BOOL:=FALSE;
(*activates the function*)
source_array: ARRAY [0..3] OF WORD:=[16#3456,16#9012,16#5678,16#1234];
(*result after a 0->1 leading edge
from start: [16#3456,16#0120,
16#6789,16#2345]*)
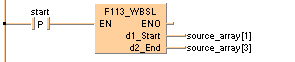
END_VARLa fonction est exécutée lorsque la variable start passe de FALSE à TRUE.
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 7 ;
NETWORK_BODY
B(B_VAROUT,,source_array[1],13,3,15,5,);
B(B_VAROUT,,source_array[3],13,4,15,6,);
B(B_CONTACT,,start,2,2,4,4,R);
B(B_F,F112_WBSR!,Instance,6,1,13,6,,?DEN?AENO?Cd1_Start?Cd2_End);
L(1,3,2,3);
L(4,3,6,3);
L(1,0,1,7);
END_NETWORK_BODY
END_NET_WORK
END_BODYIF DF(start) then
F112_WBSR( d1_Start=> source_array[1],
d2_End=> source_array[3]);
END_IF;LD |
start |
(* EN = start; Starting signal for the F113_WBSL function. *) |
F113_WBSL |
source_array[1], |
(* d1 = source_array[1] (destination1) *) |
source_array[3] |
(* d2 = source_array[3] (destination2) *) |
|
ST |
out |
(* option *) |