


 PulseOutput_Center_FB
PulseOutput_Center_FBInterpolation circulaire (position centrale)
Des impulsions sont sorties via deux voies en fonction des paramètres indiqués dans le bloc fonction et le DUT spécifié, de façon à former un arc. Le rayon du cercle est calculé en indiquant la position centrale et la position finale. Les impulsions sont renvoyées en sortie de la voie indiquée lorsque le drapeau de contrôle de cette voie est FALSE et la condition d’exécution est TRUE.
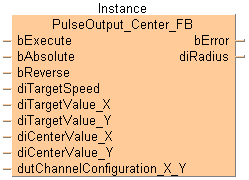
Entrée
Active le bloc fonction (avec déclenchement permanent)
Contrôle de la valeur absolue = TRUE, Contrôle de la valeur relative = FALSE
TRUE=Sens de rotation : inverse

FALSE=Sens de rotation : vers l’avant

Vitesse de consigne : Vitesse résultante des deux axes = 100–20000 (100Hz–20kHz)
Valeur de consigne (axe X) [impulsions] : -8388608–8388607
Valeur de consigne (axe Y) [impulsions] : -8388608–8388607
Valeur centrale (axe X) [impulsions] : -8388608–8388607
Valeur centrale (axe Y) [impulsions] : -8388608–8388607
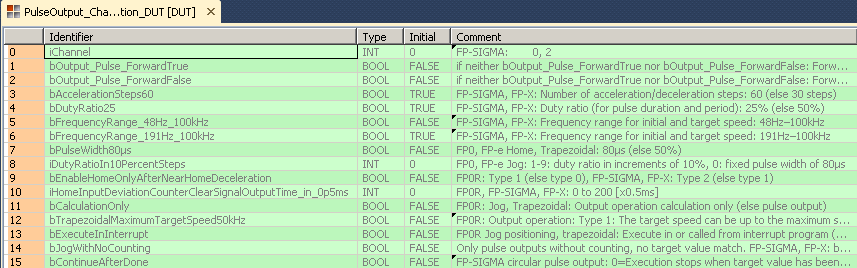
DUT système prédéfini pour la configuration des voies : PulseOutput_Channel_Configuration_DUT
Voie : 0, 2
Sortie
TRUE si une valeur d’entrée appliquée est invalide. L’exécution du bloc fonction est arrêtée.
Rayon [impulsions]
Cette instruction non inline fait partie des instructions Tool pour sorties impulsionnelles. Pour en savoir plus sur les instruction(s) utilisées en interne, voir : F176_PulseOutput_Center
Utilisez PulseInfo_IsActive pour vérifier si le drapeau de contrôle des voies sélectionnées est FALSE.
Un type de données structurées (DUT) peut être composé d’autres types de données. Un DUT est tout d’abord défini dans le gestionnaire de DUT et ensuite traité comme les autres types de données standard (BOOL, INT, etc.) dans la liste des variables globales ou l’en-tête du POU.

Toutes les variables d’entrée et de sortie utilisées pour programmer cette fonction ont été déclarées dans l’en-tête du POU. Le même en-tête de POU est utilisé pour tous les langages de programmation.
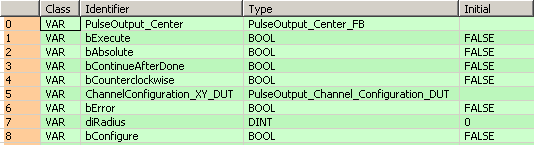
VAR
PulseOutput_Center: PulseOutput_Center_FB;
bExecute: BOOL:=FALSE;
bAbsolute: BOOL:=FALSE;
bContinueAfterDone: BOOL:=FALSE;
bCounterclockwise: BOOL:=FALSE;
ChannelConfiguration_X_DUT: PulseOutput_Channel_Configuration_DUT;
bError: BOOL:=FALSE;
diRadius: DINT:=0;
bConfigure: BOOL:=FALSE;
END_VAR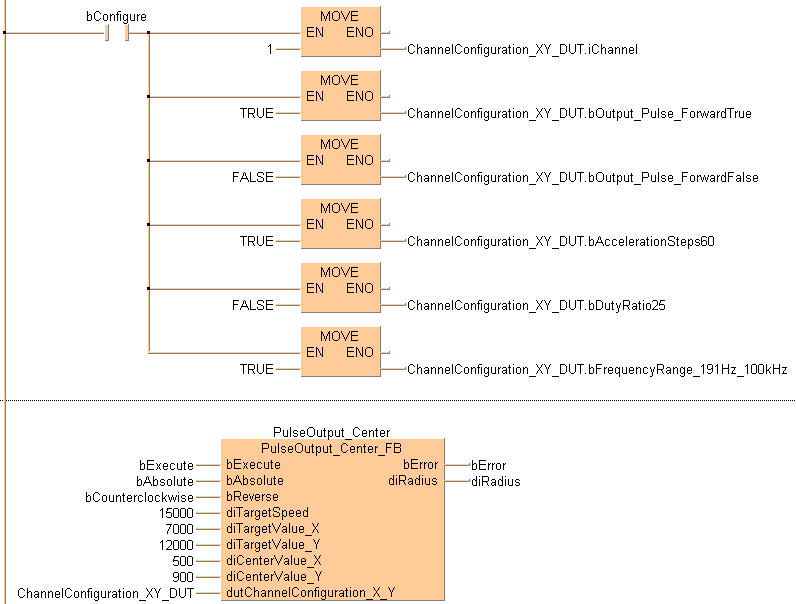
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 25 ;
NETWORK_BODY
B(B_CONTACT,,bConfigure,7,1,9,3,);
B(B_F,E_MOVE!,,19,0,25,4,,?DEN?D?AENO?C);
B(B_VARIN,,1,17,2,19,4,);
B(B_F,E_MOVE!,,19,8,25,12,,?DEN?D?AENO?C);
B(B_VARIN,,FALSE,17,10,19,12,);
B(B_VAROUT,,ChannelConfiguration_X_DUT.bOutput_Pulse_SignReverse,25,10,27,12,);
B(B_F,E_MOVE!,,19,12,25,16,,?DEN?D?AENO?C);
B(B_F,E_MOVE!,,19,4,25,8,,?DEN?D?AENO?C);
B(B_VARIN,,TRUE,17,6,19,8,);
B(B_VAROUT,,ChannelConfiguration_X_DUT.bOutput_Pulse_SignForward,25,6,27,8,);
B(B_VARIN,,TRUE,17,14,19,16,);
B(B_VAROUT,,ChannelConfiguration_X_DUT.iChannel,25,2,27,4,);
B(B_F,E_MOVE!,,19,16,25,20,,?DEN?D?AENO?C);
B(B_VARIN,,FALSE,17,18,19,20,);
B(B_VAROUT,,ChannelConfiguration_X_DUT.bDutyRatio25,25,18,27,20,);
B(B_F,E_MOVE!,,19,20,25,24,,?DEN?D?AENO?C);
B(B_VAROUT,,ChannelConfiguration_X_DUT.bAccelerationSteps60,25,14,27,16,);
B(B_VAROUT,,ChannelConfiguration_X_DUT.bFrequencyRange_191Hz_100kHz,25,22,27,24,);
B(B_VARIN,,TRUE,17,22,19,24,);
L(1,2,7,2);
L(10,2,10,6);
L(10,6,19,6);
L(9,2,10,2);
L(10,2,19,2);
L(10,10,19,10);
L(10,10,10,14);
L(10,6,10,10);
L(10,14,19,14);
L(10,14,10,18);
L(10,18,19,18);
L(10,18,10,22);
L(10,22,19,22);
L(1,0,1,25);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 13 ;
NETWORK_BODY
B(B_FB,PulseOutput_Center_FB!,PulseOutput_Center,14,1,28,13,,?BbExecute?BbAbsolute?BbContinueAfterDone?BbCounterclockwise?BdiTargetSpeed?BdiTargetValue_X?BdiTargetValue_Y?BdiCenterValue_X?BdiCenterValue_Y?BdutChannelConfiguration_X?AbError?AdiRadius);
B(B_VARIN,,bExecute,12,2,14,4,);
B(B_VARIN,,bAbsolute,12,3,14,5,);
B(B_VARIN,,bContinueAfterDone,12,4,14,6,);
B(B_VARIN,,bCounterclockwise,12,5,14,7,);
B(B_VARIN,,15000,12,6,14,8,);
B(B_VARIN,,7000,12,7,14,9,);
B(B_VARIN,,12000,12,8,14,10,);
B(B_VARIN,,500,12,9,14,11,);
B(B_VARIN,,900,12,10,14,12,);
B(B_VARIN,,ChannelConfiguration_X_DUT,12,11,14,13,);
B(B_VAROUT,,bError,28,2,30,4,);
B(B_VAROUT,,diRadius,28,3,30,5,);
L(1,0,1,13);
END_NETWORK_BODY
END_NET_WORK
END_BODY(* Used DUT parameters *)
ChannelConfiguration_XY_DUT.iChannel := 1;
ChannelConfiguration_XY_DUT.bOutput_Pulse_ForwardTrue := TRUE;
ChannelConfiguration_XY_DUT.bOutput_Pulse_ForwardFalse := FALSE;
ChannelConfiguration_XY_DUT.bAccelerationSteps60 := FALSE;
ChannelConfiguration_XY_DUT.bDutyRatio25 := TRUE;
ChannelConfiguration_XY_DUT.bFrequencyRange_191Hz_100kHz := TRUE;
ChannelConfiguration_XY_DUT.bExecuteInInterruptProgram := FALSE;
(* FB *)
PulseOutput_Center(bExecute := bExecute,
bAbsolute := bAbsolute,
bContinueAfterDone := bContinueAfterDone,
bCounterclockwise := bCounterclockwise,
diTargetSpeed := 15000,
diTargetValue_X := 7000,
diTargetValue_Y := 12000,
diCenterValue_X := 500,
diCenterValue_Y := 900,
dutChannelConfiguration_X_Y := ChannelConfiguration_XY_DUT,
bError => bError,
diRadius => diRadius);