


 FP_POS_UNIT_GET_STATUS
FP_POS_UNIT_GET_STATUSOttieni lo stato dell'asse dell'unità di posizionamento
Questa istruzione FP legge il dato di stato dall'unità di posizionamento nello slot specificato da s1_Slot e per l'asse specificato da s2_Axis se il trigger EN è TRUE. Il risultato viene memorizzato in d1_Status.
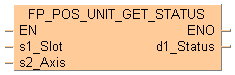
Ingresso
Numero slot
Numero asse
Valori: 1–4, 8 (asse virtuale)
Uscita
Informazioni di stato
Tipi di informazioni di stato dell'asse
Bit |
Informazioni di stato |
TRUE |
|---|---|---|
0 |
Operazione TOOL |
durante l'operazione TOOL di qualsiasi asse con Configurator PM |
1 |
Errore |
in caso di errore verificatosi sull'asse specificato |
2 |
Attenzione |
in caso di emissione di un avviso per l'asse specificato |
3 |
Occupato |
se l'asse specificato è operativo |
4 |
Operazione eseguita |
se l'operazione viene completata sull'asse specificato |
5 |
Home Return (ritorno alla posizione iniziale) eseguito |
se l'Home Return (ritorno alla posizione iniziale) viene completato sull'asse specificato |
se l'area specificata utilizzando il registro indice eccede il limite.
se il numero slot e/o asse è fuori intervallo
se l'area specificata utilizzando il registro indice eccede il limite.
se il numero slot e/o asse è fuori intervallo

Tutte le variabili di ingresso e uscita utilizzate per programmare questa funzione sono state dichiarate nell'intestazione del POU. La stessa intestazione del POU è utilizzata per tutti i linguaggi di programmazione.
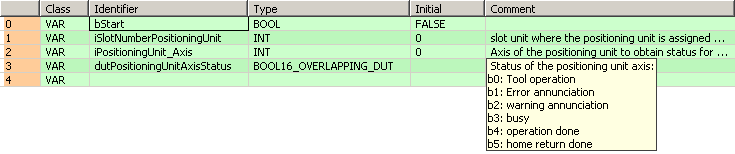
VAR
bStart: BOOL:=FALSE;
iSlotNumberPositioningUnit: INT:=0;
(*slot unit where the positioning unit is assigned 1- 64*)
iPositioningUnit_Axis: INT:=0;
(*Axis of the positioning unit to obtain status for (1-4: axis; 8: virtual axis)*)
dutPositioningUnitAxisStatus: BOOL16_OVERLAPPING_DUT;
(*Status of the positioning unit axis:
b0: Tool operation
b1: Error annunciation
b2: warning annunciation
b3: busy
b4: operation done
b5: home return done*)
END_VARQuando la variabile bStart è impostata su TRUE, la funzione viene eseguita.

BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 6 ;
NETWORK_BODY
B(B_F,FP_POS_UNIT_GET_STATUS!,,17,1,31,6,,?DEN?Ds1_Slot?Ds2_Axis?AENO?Cd1_Status);
B(B_VARIN,,iSlotNumberPositioningUnit,15,3,17,5,);
B(B_VARIN,,iPositioningUnit_Axis,15,4,17,6,);
B(B_VAROUT,,dutPositioningUnitAxisStatus.w0,31,3,33,5,);
B(B_CONTACT,,bStart,3,2,5,4,);
L(5,3,17,3);
L(1,3,3,3);
L(1,0,1,6);
END_NETWORK_BODY
END_NET_WORK
END_BODYIF bStart then
FP_POS_UNIT_GET_STATUS(s1_Slot := iSlotNumberPositioningUnit,
s2_Axis := iPositioningUnit_Axis,
d1_Status => dutPositioningUnitAxisStatus.w0);
END_IF;