


 FP_POS_UNIT_SET_TABLE
FP_POS_UNIT_SET_TABLEImposta la tabella dati di posizionamento
Questa istruzione FP avvia il posizionamento per l'unità di posizionamento nello slot specificato in s1_Slot e per l'asse specificato in s2_Axis in base alla tabella di posizionamento impostata in s3_Table se il trigger EN è TRUE. Configurare la tabella dati di posizionamento nel Configurator PM7.
Ingresso
Numero slot
Numero asse
Valori: 1–4, 8 (asse virtuale)
Numero di tabella di posizionamento
Valori: 1–600, 10001–10025
se l'area specificata utilizzando il registro indice eccede il limite.
se il numero slot e/o asse è fuori intervallo
se l'area specificata utilizzando il registro indice eccede il limite.
se il numero slot e/o asse è fuori intervallo
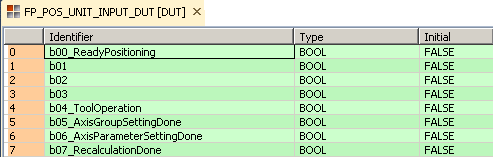
Nella lista variabili globali si definiscono variabili alle quali possono accedere tutti i POU del progetto.

Ingresso
Uscita
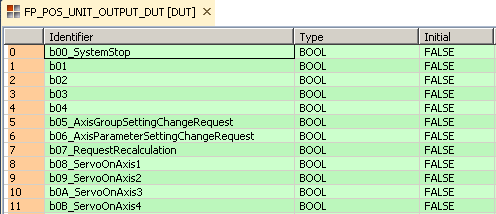
Copiate la DUT negli appunti e incollatela direttamente nel pool DUT del navigatore per utilizzare questa DUT nel programma.
Tutte le variabili di ingresso e uscita utilizzate per programmare questa funzione sono state dichiarate nell'intestazione del POU. La stessa intestazione del POU è utilizzata per tutti i linguaggi di programmazione.
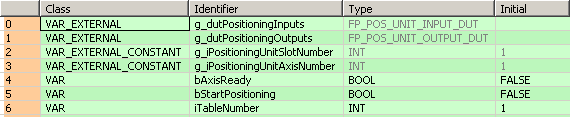
Quando la variabile bStart passa da FALSE a TRUE, la funzione viene eseguita.
VAR_EXTERNAL
g_dutPositioningInputs: FP_POS_UNIT_INPUT_DUT;
g_dutPositioningOutputs: FP_POS_UNIT_OUTPUT_DUT;
END_VAR
VAR_EXTERNAL CONSTANT
g_iPositioningUnitSlotNumber: INT:=1;
g_iPositioningUnitAxisNumber: INT:=1;
END_VAR
VAR
bAxisReady: BOOL:=FALSE;
bStartPositioning: BOOL:=FALSE;
iTableNumber: INT:=1;
@'': @'';
END_VAR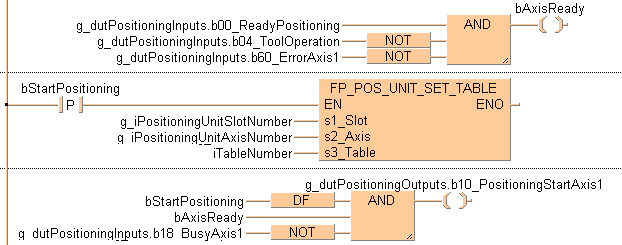
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 5 ;
NETWORK_BODY
B(B_VARIN,,g_dutPositioningInputs.b00_ReadyPositioning,21,1,23,3,);
B(B_VARIN,,g_dutPositioningInputs.b04_ToolOperation,21,2,23,4,);
B(B_F,@AND-3!,,28,1,33,5,,?D?D?D?C);
B(B_VARIN,,g_dutPositioningInputs.b60_ErrorAxis1,21,3,23,5,);
B(B_F,NOT!,,23,2,28,4,,?D?C);
B(B_F,NOT!,,23,3,28,5,,?D?C);
B(B_COIL,,bAxisReady,43,1,45,3,);
L(23,2,28,2);
L(33,2,43,2);
L(1,0,1,5);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 6 ;
NETWORK_BODY
B(B_CONTACT,,bStartPositioning,5,1,7,3,R);
B(B_F,FP_POS_UNIT_SET_TABLE!,,25,0,38,6,,?DEN?Ds1_Slot?Ds2_Axis?Ds3_Table?AENO);
B(B_VARIN,,g_iPositioningUnitSlotNumber,23,2,25,4,);
B(B_VARIN,,g_iPositioningUnitAxisNumber,23,3,25,5,);
B(B_VARIN,,iTableNumber,23,4,25,6,);
L(1,2,5,2);
L(7,2,25,2);
L(1,0,1,6);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 5 ;
NETWORK_BODY
B(B_VARIN,,bStartPositioning,21,1,23,3,);
B(B_VARIN,,bAxisReady,21,2,23,4,);
B(B_F,@AND-3!,,28,1,33,5,,?D?D?D?C);
B(B_VARIN,,g_dutPositioningInputs.b18_BusyAxis1,21,3,23,5,);
B(B_F,NOT!,,23,3,28,5,,?D?C);
B(B_COIL,,g_dutPositioningOutputs.b10_PositioningStartAxis1,43,1,45,3,);
B(B_F,DF!,,23,0,28,3,,?Di?Co);
L(23,3,28,3);
L(33,2,43,2);
L(1,0,1,5);
END_NETWORK_BODY
END_NET_WORK
END_BODYIf (g_dutPositioningInputs.b00_ReadyPositioning AND NOT g_dutPositioningInputs.b04_ToolOperation
AND NOT g_dutPositioningInputs.b60_ErrorAxis1) then
bAxisReady:=TRUE;
End_if;
If (bStart) then
FP_POS_UNIT_SET_TABLE(s1_Slot := g_iPositioningUnitSlotNumber,
s2_Axis := g_iPositioningUnitAxisNumber,
s3_Table := iTableNumber);
End_if;
If DF((bStart) AND bAxisReady Then AND NOT g_dutPositioningInputs.b18_BusyAxis1) then
g_dutPositioningOutputs.b10_PositioningStartAxis1:=TRUE;
End_if;