


 F168_PulseOutput_Home
F168_PulseOutput_HomeHome Return (ritorno alla posizione iniziale)
Questa istruzione effettua un Home Return secondo i parametri della DUT specificata. Gli impulsi vengono emessi dal canale specificato quando il flag di controllo per tale canale è FALSE e la condizione di esecuzione è TRUE.
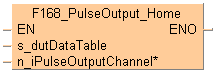
Ingresso
Indirizzo di partenza dell'area contenente la tabella dati
Uscita ad impulsi: 0 o 1
Dopo che sistema di azionamento è stato attivato, vi è una differenza tra posizione interna (valore corrente) e la posizione meccanica dell’asse; questa differenza non può essere determinata anticipatamente. Per avere corrispondenza tra il valore interno dell’asse e la posizione reale è necessario eseguire un’operazione di sincronizzazione. La sincronizzazione si effettua mediante un’istruzione di Home Return, durante il quale il valore della posizione viene registrato (azzerato) in una determinata posizione (Home). Con l’istruzione di Home Return vengono emessi impulsi finché non viene attivato l’ingresso di home. L'allocazione I/O dipende dal canale. Per decelerare il moto durante l'avvicinamento alla posizione di home, si deve stabilire un ingresso near home e mettere il bit 4 del registro dati speciali nel quale è memorizzato il codice di controllo per l'uscita degli impulsi (sys_wHscOrPulseControlCode) prima su TRUE e poi di nuovo su FALSE. Il valore nell'area valore corrente durante un Home Return (ritorno alla posizione iniziale) differisce rispetto al valore attuale. Quando il return è completato, il valore corrente cambia in 0.
Selezionate una delle due diverse modalità operative:
Tipo 1: L'ingresso home può essere attivato indipendentemente dal fatto che vi sia o no un ingresso near home, che la decelerazione stia avendo luogo o che la decelerazione sia stata completata.
Senza ingresso near home:

Con ingresso near home:

Tipo 2: L'ingresso home può essere attivato solo dopo che una decelerazione (iniziata da un ingresso near home) è stata completata.

Nella DUT possono essere specificati i seguenti parametri: F168_PulseOutput_Home_DUT
Codice di controllo
Velocità iniziale e finale
Velocità target
Tempo di accelerazione/decelerazione
Fine tabella (fisso)
La frequenza dell'uscita ad impulsi cambia secondo il tempo di accelerazione/decelerazione.
La differenza fra velocità target e velocità iniziale determina il tipo di rampa.
Nei registri di sistema impostare un contatore veloce assegnato ad un canale di uscita ad impulsi su "Non utilizzato".
Durante il lavoro ai programmi nella modalità operativa RUN l’uscita ad impulsi si arresta, ma riprende dopo che sono state scaricate le modifiche al programma.
Il flag di controllo del contatore veloce (p.es. sys_bIsHscChannel0ControlActive) e il flag di controllo dell’uscita ad impulsi (p.es. sys_bIsPulseChannel0Active) vengono allocati allo stesso numero di flag interno speciale (p.es. R903A). Pertanto, quando viene eseguita un'istruzione contatore veloce o un'istruzione uscita ad impulsi, il flag di controllo del contatore veloce (p.es. sys_bIsHscChannel0ControlActive) e il flag di controllo dell'uscita ad impulsi (p.es. sys_bIsPulseChannel0Active) per il canale utilizzato sono TRUE. Finché questo flag è TRUE non può essere eseguita nessun’altra istruzione contatore veloce o istruzione uscita ad impulsi.
Anche in presenza dell’ingresso home, l’esecuzione di questa istruzione provoca l’avvio dell’emissione di impulsi.
Se l’ingresso near home viene abilitato mentre l’accelerazione è in corso, verrà avviata la decelerazione.
Se sia il programma principale sia il programma di interrupt contengono un codice per lo stesso canale, essi non devono poter esser eseguiti contemporaneamente.
Si raccomanda vivamente di incorporare un'opzione di stop uscita impulsi nel proprio programma di posizionamento.
Lo stato del flag di controllo del contatore veloce o del flag di controllo dell'uscita ad impulsi può variare durante lo svolgimento di una scansione. For example, if the number of received bytes is read more than once different statuses may exist within one scan.
Per svolgere l'FP0R nella modalità "FP0 compatibile", si può scaricare un programma FP0 nell'FP0R. Si prega di tenere presenti le seguenti restrizioni:
L'FP0R supporta dati a 32- bit con segno per il valore corrente ed il valore target; l'FP0 supporta dati a 24- bit con segno. Nella modalità "FP0 compatibile", il conteggio e l'uscita ad impulsi continuano anche se i dati eccede il range dell'FP0.
Il duty ratio ammonta sempre al 25% indipendentemente dalle impostazioni nelle istruzioni. Con la tipologia di uscita ad impulsi “impulsi/direzione,” gli impulsi sono emessi all’incirca 300ms dopo che è stato emesso il segnale della direzione; contemporaneamente viene tenuto conto delle caratteristiche del motore.
L'FP0R non supporta l'impostazione "nessun conteggio". Il conteggio avanti viene invece effettuato con l'istruzione uscita ad impulsi FP0 impostata su "nessun conteggio".
La frequenza massima dell'uscita ad impulsi è di 10000Hz.
È indispensabile che l'istruzione sull'uscita ad impulsi non impieghi un'uscita usata al tempo stesso come uscita normale.
Affinché un programma FP0 possa svolgersi nella modalità “FP0 compatibile”, i tipi di PLC (C10, C14, C16, C32, e T32) devono corrispondere perfettamente. La modalità "FP0 compatibile" non è disponibile per l'F32 tipo FP0R.
Numeri canale e uscita ad impulsi
| Canale n.° | Uscita ad impulsi | Tipologia di uscita ad impulsi |
0 |
Y0 |
Impulso |
Y2 |
Direzione | |
1 |
Y1 |
Impulso |
Y3 |
Direzione |
Variabili di sistema per le aree di memoria utilizzate. I valori fra parentesi sono validi per FP0 T32.
Descrizione |
Variabile di sistema |
|
|---|---|---|
Uscita ad impulsi: flag di controllo per il canale |
0 |
sys_bIsPulseChannel0Active |
1 |
sys_bIsPulseChannel1Active |
|
Uscita ad impulsi: valore corrente per il canale |
0 |
sys_diPulseChannel0ElapsedValue |
1 |
sys_diPulseChannel1ElapsedValue |
|
Uscita ad impulsi: valore target per il canale |
0 |
sys_diPulseChannel0TargetValue |
1 |
sys_diPulseChannel1TargetValue |
|
Codice di controllo per contatore veloce o uscita ad impulsi |
sys_wHscOrPulseControlCode |
|
| Canale n.° | Ingresso home |
0 |
X0 |
1 |
X1 |

Tutte le variabili di ingresso e uscita utilizzate per programmare questa funzione sono state dichiarate nell'intestazione del POU. La stessa intestazione del POU è utilizzata per tutti i linguaggi di programmazione.

VAR_EXTERNAL
X0_bMotorSwitch: BOOL:=FALSE;
(*at X0*)
END_VAR
VAR
dutHome: F168_PulseOutput_Home_DUT:=wControlCode := 16#102,
iInitialAndFinalSpeed := 0,
iTargetSpeed := 0,
iAccelerationAndDecelerationTime := 0;
iInitialAndFinalSpeed: INT:=3000;
iTargetSpeed: INT:=7000;
iAccelerationTime: INT:=300;
@'': @'';
END_VAR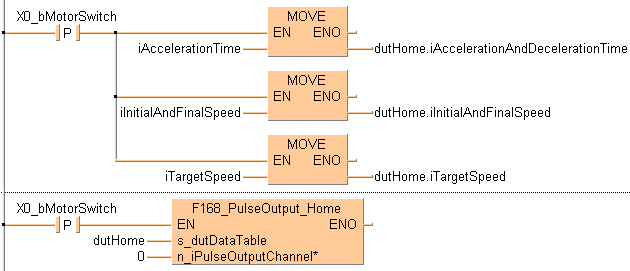
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 13 ;
NETWORK_BODY
B(B_CONTACT,,X0_bMotorSwitch,4,2,6,4,R);
B(B_F,E_MOVE!,Instance,17,1,23,5,,?DEN?D?AENO?C);
B(B_VAROUT,,dutHome.iAccelerationAndDecelerationTime,23,3,25,5,);
B(B_F,E_MOVE!,Instance,17,5,23,9,,?DEN?D?AENO?C);
B(B_VAROUT,,dutHome.iInitialAndFinalSpeed,23,7,25,9,);
B(B_F,E_MOVE!,Instance,17,9,23,13,,?DEN?D?AENO?C);
B(B_VAROUT,,dutHome.iTargetSpeed,23,11,25,13,);
B(B_VARIN,,iAccelerationTime,15,3,17,5,);
B(B_VARIN,,iInitialAndFinalSpeed,15,7,17,9,);
B(B_VARIN,,iTargetSpeed,15,11,17,13,);
L(1,3,4,3);
L(6,3,17,3);
L(8,3,8,11);
L(8,11,17,11);
L(8,7,17,7);
L(1,0,1,13);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 5 ;
NETWORK_BODY
B(B_CONTACT,,X0_bMotorSwitch,4,1,6,3,R);
B(B_F,F168_PulseOutput_Home!,Instance,11,0,24,5,,?DEN?Ds_dutDataTable?Hn_iPulseOutputChannel?AENO);
B(B_VARIN,,dutHome,9,2,11,4,);
B(B_VARIN,,0,9,3,11,5,);
L(1,2,4,2);
L(6,2,11,2);
L(1,0,1,5);
END_NETWORK_BODY
END_NET_WORK
END_BODYIF DF(X0_bMotorSwitch) then
dutHome.iInitialAndFinalSpeed:=iInitialAndFinalSpeed
dutHome.iTargetSpeed:=iTargetSpeed
dutHome.iAccelerationAndDecelerationTime:=iAccelerationTime
END_IF;
IF DF(X0_bMotorSwitch) then
F168_PulseOutput_Home(s_dutDataTable := dutHome,
n_iPulseOutputChannel :=0);
END_IF;