F170_PulseOutput_PWM
F170_PulseOutput_PWMUscita PWM
Questa istruzione fornisce un segnale di uscita con impulsi modulati in larghezza. I parametri per l’emissione di impulsi sono stabiliti in una DUT. Gli impulsi vengono emessi dal canale specificato quando il flag di controllo per tale canale è FALSE e la condizione di esecuzione è TRUE.
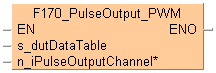
Ingresso
Indirizzo di partenza dell'area contenente la tabella dati
Uscita ad impulsi: 0 o 1
Utilizzare la seguente DUT predefinita: F170_PulseOutput_PWM_DUT
Nella DUT possono essere specificati i seguenti parametri:
Frequenza approssimativa
Duty ratio (per ampiezza impulsi e periodo)
Rapporto tra l'ampiezza impulsi e il periodo di una forma d'onda rettangolare. Per un'uscita ad impulsi in cui l'ampiezza impulsi è 1ms e il periodo di impulso è 4ms, il duty è 0,25 o 25%.
Non appena si inizia a modificare un programma online (ossia in modalità RUN) utilizzando questa istruzione, l’emissione di impulsi si arresta.
Nei registri di sistema impostare un contatore veloce assegnato ad un canale di uscita ad impulsi su "Non utilizzato".
Se sia il programma principale sia il programma di interrupt contengono un codice per lo stesso canale, essi non devono poter esser eseguiti contemporaneamente.
Il flag di controllo del contatore veloce (p.es. sys_bIsHscChannel0ControlActive) e il flag di controllo dell’uscita ad impulsi (p.es. sys_bIsPulseChannel0Active) vengono allocati allo stesso numero di flag interno speciale (p.es. R903A). Pertanto, quando viene eseguita un'istruzione contatore veloce o un'istruzione uscita ad impulsi, il flag di controllo del contatore veloce (p.es. sys_bIsHscChannel0ControlActive) e il flag di controllo dell'uscita ad impulsi (p.es. sys_bIsPulseChannel0Active) per il canale utilizzato sono TRUE. Finché questo flag è TRUE non può essere eseguita nessun’altra istruzione contatore veloce o istruzione uscita ad impulsi.
Ad un certo punto vicino al duty ratio minimo o massimo, l'uscita viene ritardata, il che potrebbe provocare una discrepanza nel duty ratio rispetto al valore specificato.
Il duty ratio può essere modificato per ogni scansione. La modifica diventa effettiva con la successiva emissione di impulsi. L'impostazione della frequenza diventa effettiva solo all'avvio dell'esecuzione di un'istruzione.
Si raccomanda vivamente di incorporare un'opzione di stop uscita impulsi nel proprio programma di posizionamento.
Lo stato del flag di controllo del contatore veloce o del flag di controllo dell'uscita ad impulsi può variare durante lo svolgimento di una scansione. For example, if the number of received bytes is read more than once different statuses may exist within one scan.
Per svolgere l'FP0R nella modalità "FP0 compatibile", si può scaricare un programma FP0 nell'FP0R.
Numeri canale e uscita ad impulsi
| Canale n.° | Uscita ad impulsi | Tipologia di uscita ad impulsi |
0 |
Y0 |
Impulso |
Y2 |
Direzione | |
1 |
Y1 |
Impulso |
Y3 |
Direzione |
Variabili di sistema per le aree di memoria utilizzate. I valori fra parentesi sono validi per FP0 T32.
Descrizione |
Variabile di sistema |
|
|---|---|---|
Uscita ad impulsi: flag di controllo per il canale |
0 |
sys_bIsPulseChannel0Active |
1 |
sys_bIsPulseChannel1Active |
|
Uscita ad impulsi: valore corrente per il canale |
0 |
sys_diPulseChannel0ElapsedValue |
1 |
sys_diPulseChannel1ElapsedValue |
|
Uscita ad impulsi: valore target per il canale |
0 |
sys_diPulseChannel0TargetValue |
1 |
sys_diPulseChannel1TargetValue |
|
Codice di controllo per contatore veloce o uscita ad impulsi |
sys_wHscOrPulseControlCode |
|
Nella lista variabili globali si definiscono variabili alle quali possono accedere tutti i POU del progetto.

La DUT F170_PulseOutput_PWM_DUT è predefinita nella FP Library.

Tutte le variabili di ingresso e uscita utilizzate per programmare questa funzione sono state dichiarate nell'intestazione del POU. La stessa intestazione del POU è utilizzata per tutti i linguaggi di programmazione.

VAR_EXTERNAL
X6_bEnablePWM: BOOL:=FALSE;
END_VAR
VAR
dutPWMControl: F170_PulseOutput_PWM_DUT;
(*iFrequencyValue := 1: f=2.0Hz, T=502.5ms;*)
iPulseWidthModulationDuty: INT:=500;
(*500=50% duty*)
@'': @'';
END_VAR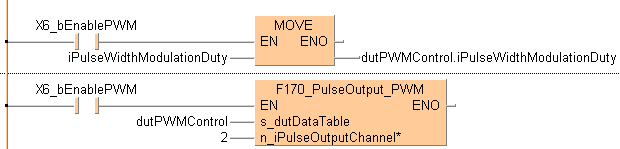
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 5 ;
NETWORK_BODY
B(B_F,E_MOVE!,Instance,15,1,21,5,,?DEN?D?AENO?C);
B(B_VARIN,,iPulseWidthModulationDuty,13,3,15,5,);
B(B_VAROUT,,dutPWMControl.iPulseWidthModulationDuty,21,3,23,5,);
B(B_CONTACT,,X6_bEnablePWM,4,2,6,4,);
L(6,3,15,3);
L(1,3,4,3);
L(1,0,1,5);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 6 ;
NETWORK_BODY
B(B_CONTACT,,X6_bEnablePWM,4,2,6,4,);
B(B_F,F170_PulseOutput_PWM!,Instance,13,1,26,6,,?DEN?Ds_dutDataTable?Hn_iPulseOutputChannel?AENO);
B(B_VARIN,,dutPWMControl,11,3,13,5,);
B(B_VARIN,,2,11,4,13,6,);
L(1,3,4,3);
L(6,3,13,3);
L(1,0,1,6);
END_NETWORK_BODY
END_NET_WORK
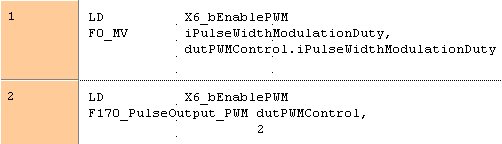
END_BODYIF (X6_bEnablePWM) then
dutPWMControl.iPulseWidthModulationDuty:=iPulseWidthModulationDuty;
END_IF;
IF (X6_bEnablePWM) then
F170_PulseOutput_PWM(s_dutDataTable := dutPWMControl,
n_iPulseOutputChannel := 2);
END_IF;