


 PulseOutput_Trapezoidal_FB
PulseOutput_Trapezoidal_FBControllo trapezoidale
Questa istruzione effettua automaticamente un controllo trapezoidale secondo i parametri impostati nel Function Block e nella DUT specificata. Gli impulsi vengono emessi dal canale specificato quando il flag di controllo per tale canale è FALSE e la condizione di esecuzione è TRUE.
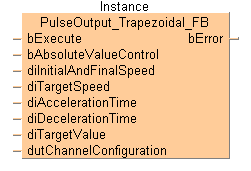
Ingresso
FP-SIGMA, FP-X, FP0, F168_PulseOutput_Trapezoidal: Solo con trigger sul fronte
F171_PulseOutput_Trapezoidal: La condizione di esecuzione può essere: con trigger sul fronte permanente, se è necessario un cambio di velocità.
Modalità di controllo assoluto = TRUE, Modalità di controllo relativo = FALSE
Velocità iniziale e finale: Impostate questo valore secondo il campo di frequenza selezionato in PulseOutput_Channel_Configuration_DUT:
FPS, FP-X: 1–9800 (1,5Hz–9,8kHz)
48–100000 (48Hz–100kHz)
191–100000 (191–100kHz)
F171_PulseOutput_Trapezoidal: 1–50000 (1Hz–50kHz)
FP0, F168_PulseOutput_Trapezoidal: 40–5000 (40Hz–5kHz)
Velocità target: Impostate questo valore secondo il campo di frequenza selezionato in PulseOutput_Channel_Configuration_DUT:
FPS, FP-X: 1–9800 (1,5Hz–9,8kHz)
48–100000 (48Hz–100kHz)
191–100000 (191–100kHz)
F171_PulseOutput_Trapezoidal: 1–50000 (1Hz–50kHz)
FP0, F168_PulseOutput_Trapezoidal: 40–5000 (40Hz–5kHz)
Tempo di accelerazione/decelerazione (FPS, FP-X):
Con 30 passi: 30ms–32760ms (specificare in passi di 30)
Con 60 passi: 60ms–32760ms (specificare in passi di 60)
Tempo di accelerazione/decelerazione (FP0, F168_PulseOutput_Trapezoidal): 30ms–32760ms
Tempo di accelerazione (F171_PulseOutput_Trapezoidal): 1ms–32760ms
Tempo di decelerazione (F171_PulseOutput_Trapezoidal): 1ms–32760ms
Valore target[impulsi]: -2147483648–2147483647
Uscita
TRUE se un valore di ingresso applicato non è valido. L'esecuzione del Function Block si arresta.
Questa istruzione non in linea è parte delle istruzioni TOOL per uscita ad impulsi. Per una descrizione dettagliata delle istruzioni utilizzate internamente, vedere:
FPS, FP-X: F171_PulseOutput_Trapezoidal
FP0: F168_PulseOutput_Trapezoidal
Utilizzate PulseInfo_IsActive per controllare che il flag di controllo per il canale selezionato sia FALSE.
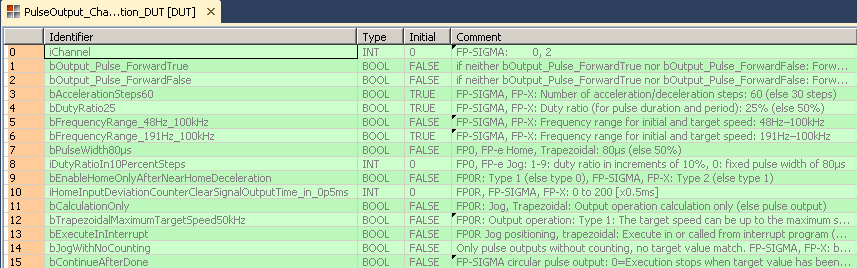
Con un tipo unità dati (DUT) è possibile definire un tipo unità dati composto da altri tipi di dati. Una DUT è definita prima di tutto nel gruppo DUT e poi elaborata come i tipi di dati standard (BOOL, INT, ecc.) nella lista delle variabili globali o nell'intestazione del POU.

Tutte le variabili di ingresso e uscita utilizzate per programmare questa funzione sono state dichiarate nell'intestazione del POU. La stessa intestazione del POU è utilizzata per tutti i linguaggi di programmazione.
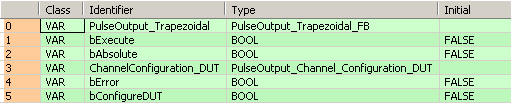
VAR
PulseOutput_Trapezoidal: PulseOutput_Trapezoidal_FB;
bExecute: BOOL:=FALSE;
bAbsolute: BOOL:=FALSE;
ChannelConfiguration_DUT: PulseOutput_Channel_Configuration_DUT;
bError: BOOL:=FALSE;
bConfigureDUT: BOOL:=FALSE;
END_VAR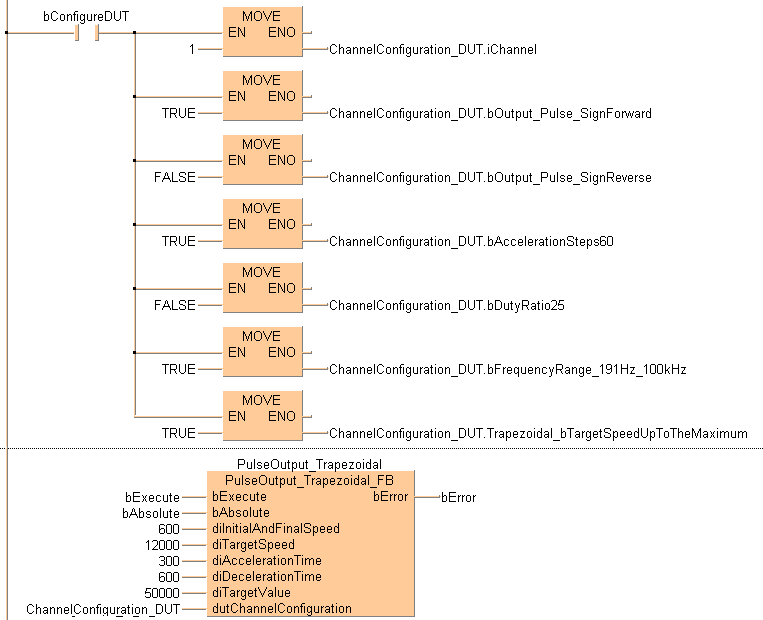
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 28 ;
NETWORK_BODY
B(B_CONTACT,,bConfigureDUT,5,1,7,3,);
B(B_F,E_MOVE!,,14,0,20,4,,?DEN?D?AENO?C);
B(B_VARIN,,1,12,2,14,4,);
B(B_F,E_MOVE!,,14,8,20,12,,?DEN?D?AENO?C);
B(B_VARIN,,FALSE,12,10,14,12,);
B(B_VAROUT,,ChannelConfiguration_DUT.bOutput_Pulse_SignReverse,20,10,22,12,);
B(B_F,E_MOVE!,,14,12,20,16,,?DEN?D?AENO?C);
B(B_F,E_MOVE!,,14,4,20,8,,?DEN?D?AENO?C);
B(B_VARIN,,TRUE,12,6,14,8,);
B(B_VAROUT,,ChannelConfiguration_DUT.bOutput_Pulse_SignForward,20,6,22,8,);
B(B_VARIN,,TRUE,12,14,14,16,);
B(B_VAROUT,,ChannelConfiguration_DUT.iChannel,20,2,22,4,);
B(B_F,E_MOVE!,,14,16,20,20,,?DEN?D?AENO?C);
B(B_VARIN,,FALSE,12,18,14,20,);
B(B_VAROUT,,ChannelConfiguration_DUT.bDutyRatio25,20,18,22,20,);
B(B_VAROUT,,ChannelConfiguration_DUT.bAccelerationSteps60,20,14,22,16,);
B(B_VAROUT,,ChannelConfiguration_DUT.bFrequencyRange_191Hz_100kHz,20,22,22,24,);
B(B_VARIN,,TRUE,12,22,14,24,);
B(B_F,E_MOVE!,,14,20,20,24,,?DEN?D?AENO?C);
B(B_F,E_MOVE!,,14,24,20,28,,?DEN?D?AENO?C);
B(B_VARIN,,TRUE,12,26,14,28,);
B(B_VAROUT,,ChannelConfiguration_DUT.Trapezoidal_bTargetSpeedUpToTheMaximum,20,26,22,28,);
L(9,18,14,18);
L(9,14,14,14);
L(9,10,14,10);
L(9,6,14,6);
L(9,2,9,18);
L(9,18,9,22);
L(9,22,14,22);
L(9,22,9,26);
L(9,26,14,26);
L(9,2,14,2);
L(7,2,9,2);
L(1,2,5,2);
L(1,0,1,28);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 11 ;
NETWORK_BODY
B(B_FB,PulseOutput_Trapezoidal_FB!,PulseOutput_Trapezoidal,14,1,28,11,,?BbExecute?BbAbsolute?BdiInitialAndFinalSpeed?BdiTargetSpeed?BdiAccelerationTime?BdiDecelerationTime?BdiTargetValue?BdutChannelConfiguration?AbError);
B(B_VARIN,,bExecute,12,2,14,4,);
B(B_VARIN,,bAbsolute,12,3,14,5,);
B(B_VARIN,,600,12,4,14,6,);
B(B_VARIN,,12000,12,5,14,7,);
B(B_VARIN,,300,12,6,14,8,);
B(B_VARIN,,600,12,7,14,9,);
B(B_VARIN,,50000,12,8,14,10,);
B(B_VARIN,,ChannelConfiguration_DUT,12,9,14,11,);
B(B_VAROUT,,bError,28,2,30,4,);
L(1,0,1,11);
END_NETWORK_BODY
END_NET_WORK
END_BODY(* Used DUT parameters *)
ChannelConfiguration_DUT.iChannel := 1;
ChannelConfiguration_DUT.bOutput_Pulse_ForwardTrue := TRUE;
ChannelConfiguration_DUT.bOutput_Pulse_ForwardFalse := FALSE;
ChannelConfiguration_DUT.bAccelerationSteps60 := FALSE;
ChannelConfiguration_DUT.bDutyRatio25 := TRUE;
ChannelConfiguration_DUT.bFrequencyRange_191Hz_100kHz := TRUE;
ChannelConfiguration_DUT.Trapezoidal_bTargetSpeedUpToTheMaximum := TRUE;
ChannelConfiguration_DUT.bExecuteInInterrupt := FALSE;
(* FB *)
PulseOutput_Trapezoidal(bExecute := bExecute,
bAbsolute := bAbsolute,
diInitialAndFinalSpeed := 600,
diTargetSpeed := 12000,
diAccelerationTime := 300,
diDecelerationTime := 600,
diTargetValue := 50000,
dutChannelConfiguration := ChannelConfiguration_DUT,
bError => bError);