F300_BSIN
F300_BSINSinus-Funktion mit BCD-codierten Werten
Die Funktion berechnet den Sinus eines BCD-Winkelwertes (Eingang s) und speichert das Ergebnis (Ausgang d) als BCD-Wert in einem ARRAY mit drei Elementen.
Eingang
16-Bit-Bereich zur Speicherung des Winkelwertes
Ausgang
Ergebnis wird in 3 Wörtern gespeichert
BCD-Werte für den Eingang s liegen im Bereich von 0° bis 360° (16#0 bis 16#360) in 1° Schritten. Damit kann das am Ausgang d anliegende Ergebnis Werte im Bereich von -1,0000 bis 1,0000 annehmen. Das Funktionsergebnis wird wie folgt zurückgegeben:
Vorzeichen des Eingangswertes (0 bei positivem Vorzeichen, 1 bei negativem Vorzeichen).
Vorkommawert als ganze Zahl (0 oder 1).
Nachkommastellen als BCD-codierter Wert auf 4 Stellen gerundet (16#0 bis 16#9999).
wenn s kein BCD-codierter Wert ist.
wenn s nicht zwischen 0° und 360° liegt.
wenn s kein BCD-codierter Wert ist.
wenn s nicht zwischen 0° und 360° liegt.
wenn das Funktionsergebnis 0 ist.
wenn das Ergebnis einen Speicherüberlauf verursacht.

Im POE-Kopf werden alle Ein- und Ausgangsvariablen deklariert, die für die Programmierung dieser Funktion verwendet werden. Für alle Programmiersprachen wird der gleiche POE-Kopf verwendet.

VAR
start: BOOL:=FALSE;
(*activates the function*)
input_value: WORD:=16#30;
(*corresponds to 30°*)
output_value: ARRAY [0..2] OF WORD:=[3(0)];
(*result after a 0->1 leading
edge from start:
[0,0,5000]*)
input_181_to_359: BOOL:=FALSE;
input_90_or_270: BOOL:=FALSE;
END_VARIn diesem Beispiel wird die Eingangsvariable input_value deklariert. Statt dessen können Sie im Rumpf auch eine Konstante (z.B. 16#45 für 45°) direkt an den Eingang der Funktion schreiben.
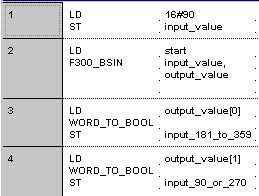
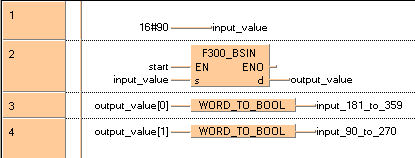
Im Rumpf wird der Variablen input_value der Wert 90° zugewiesen. Wenn die Variable start auf TRUE gesetzt wird, wird die Funktion F300_BSIN ausgeführt. Sie speichert das Ergebnis in der Variablen output_value. Liegt input_value zwischen 181° und 359°, hat output_value ein negatives Vorzeichen. Die Funktion WORD_TO_BOOL setzt in diesem Fall die Variable input_181_to_359 auf TRUE. Bei einem input_value von 90° oder 270° hat output_value 1 als Vorkommawert. Ist dies der Fall, dann setzt eine weitere Funktion WORD_TO_BOOL die Variable input_90_or_270 auf TRUE.
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 3 ;
NETWORK_BODY
B(B_VARIN,,16#90,8,0,10,2,);
B(B_VAROUT,,input_value,10,0,12,2,);
L(1,0,1,3);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 4 ;
NETWORK_BODY
B(B_F,F300_BSIN,,10,0,19,4,,?DEN?D@'s'?AENO?Cd);
B(B_VARIN,,input_value,8,2,10,4,);
B(B_VAROUT,,output_value,19,2,21,4,);
B(B_VARIN,,output,8,1,10,3,);
L(1,0,1,4);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 3 ;
NETWORK_BODY
B(B_VARIN,,output_value[0],8,1,10,3,);
B(B_F,WORD_TO_BOOL,,10,0,21,3,,?Da_Word?C);
B(B_VAROUT,,input_181_to_359,21,1,23,3,);
L(1,0,1,3);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 3 ;
NETWORK_BODY
B(B_VARIN,,output_value[1],8,1,10,3,);
B(B_F,WORD_TO_BOOL,,10,0,21,3,,?Da_Word?C);
B(B_VAROUT,,input_90_or_270,21,1,23,3,);
L(1,0,1,3);
END_NETWORK_BODY
END_NET_WORK
END_BODYinput_value:=16#90;
IF start THEN
F300_BSIN( input_value, output_value );
END_IF;
input_181_to_359:=WORD_TO_BOOL(output_value[0]);
input_90_or_270:=WORD_TO_BOOL(output_value[1]);