


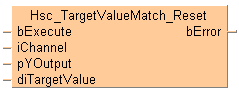
 Hsc_TargetValueMatch_Reset
Hsc_TargetValueMatch_ResetZählervergleichsausgang zurücksetzen (schneller Zähler)
Wenn der Istwert den Sollwert diTargetValue des durch iChannel festgelegten schnellen Zählerkanals erreicht, wird der durch pYOutput festgelegte Ausgang sofort auf FALSE gesetzt.
Eingang
Eine steigende Flanke aktiviert die Funktion; Auswertung des Kontrollmerkers "Schneller Zähler" mit HscInfo_IsActive.
FPS: 0, 2
FP-X R: 0, 1
FP-X 16K C14T: 0, 1, 2
FP-X 32K C30T, C60T: 0, 1, 2, 3
FP0R: 0, 1, 2, 3
FP0: 0, 1
FP-e: 0, 1
Durch GetPointer erhaltenes Zeigerergebnis von einer globalen Variable, die Kanalnummer und Ausgang liefert.
Geben Sie für den Sollwert einen 32-Bit-Datenwert innerhalb des folgenden Bereichs ein:
FP0, FP-e: -838808–+8388607
FPS, FP-X, FP0R: -2147483467–+2147483648
Ausgang
TRUE, wenn die Kombination von Channel%d und pYOuput.iOffset nicht mit einer gültigen Kombination von Kanalnummer und Ausgang übereinstimmt, wie sie von der globalen Variablen vorgegeben wird.
Dieser Nicht-Inline-Befehl ist Teil der Tool-Befehle für die schnellen Zähler. Eine ausführliche Beschreibung der intern verwendeten Befehle finden Sie in der : F167_HighSpeedCounter_Reset
Um die Kombination von Kanal und Y-Ausgang zu prüfen, benötigt der Compiler das folgende Benennungsmuster für globale Variablen: %sHsc_TargetValueMatch_Channel%d_Y%d_%s
Verwenden Sie für globale Variablen in Zählervergleichsfunktionen grundsätzlich dieses Muster.
Channel%d muss ein schneller Zählerkanal sein, der in den Systemregistern aktiviert ist.
Y%d muss eine explizite, von der SPS unterstützte Ausgangsadresse sein
FP-S, FP0, FP-e: |
Y0–Y7 |
FP-S (V3.1 oder eine neuere Version), FP0R |
Y0–Y1F |
FP-X: |
Y0–Y29F |
%s ist ein optionaler Deskriptor am Musteranfang
%s ist ein optionaler Deskriptor am Musterende
| Optional | Vorgegebenes Muster | Optional |
g_b |
Hsc_TargetValueMatch_ChannelA_Y11F |
_MotorOn |
Diese globale Variable erzeugt den Code für Kanal A und Ausgang Y11F.
In der globalen Variablenliste können Sie Variablen festlegen, die von allen POEs des Projekts verwendet werden können.


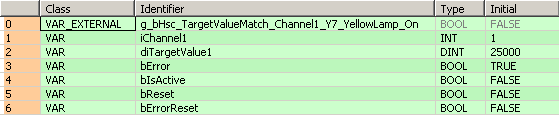
Im POE-Kopf werden alle Ein- und Ausgangsvariablen deklariert, die für die Programmierung dieser Funktion verwendet werden. Für alle Programmiersprachen wird der gleiche POE-Kopf verwendet.
VAR
VAR
bExecute: BOOL:=0;
iChannel1: INT:=1;
diTargetValue1: DINT:=15000;
bIsActive: BOOL:=FALSE;
diElapsedValue: DINT:=0;
bReset: BOOL:=FALSE;
bErrorReset: BOOL:=FALSE;
END_VARVerwenden Sie HscInfo_IsActive, um den durch iChannel1 festgelegten Kanal auszuwerten. Wenn eine steigende Flanke bei bReset erkannt wird, und wenn bIsActive nicht TRUE ist, wird der Befehl ausgeführt. Die Kombination aus Kanalnummer und Ausgangskontakt wird in der globalen Variablen g_bHsc_TargetValueMatch_Channel1_Y7_YellowLamp_On überprüft. Wenn der schnelle Zähler an Kanal 1 den Sollwert diTargetValue1 erreicht, wird der Ausgang Y7 auf FALSE gesetzt.

BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 3 ;
NETWORK_BODY
B(B_F,HscInfo_IsActive!,,9,0,18,3,,?DiChannel?C);
B(B_VARIN,,iChannel1,7,1,9,3,);
B(B_VAROUT,,bIsActive,18,1,20,3,);
L(1,0,1,3);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 7 ;
NETWORK_BODY
B(B_CONTACT,,bReset,2,1,4,3,R);
B(B_CONTACT,,bIsActive,6,1,8,3,N);
B(B_VARIN,,iChannel1,31,2,33,4,);
B(B_VARIN,,diTargetValue1,31,4,33,6,);
B(B_VAROUT,,bErrorReset,47,1,49,3,);
B(B_F,GetPointer!,,26,3,33,5,,?D?C);
B(B_VARIN,,g_bHsc_TargetValueMatch_Channel1_Y7_YellowLamp_On,24,3,26,5,);
B(B_F,Hsc_TargetValueMatch_Reset!,,33,0,47,6,,?DbExecute?DiChannel?DpYOutput?DdiTargetValue?CbError);
L(1,2,2,2);
L(4,2,6,2);
L(8,2,33,2);
L(1,0,1,7);
END_NETWORK_BODY
END_NET_WORK
END_BODYbIsActive:=HscInfo_IsActive(iChannel1);
Hsc_TargetValueMatch_Reset(bExecute := DF(bReset) AND NOT bIsActive,
iChannel := iChannel1,
pYOutput := GetPointer(g_bHsc_TargetValueMatch_Channel1_Y7_YellowLamp_On),
diTargetValue := diTargetValue1,
bError => bErrorReset);