


 ATAN2_YX_LREAL
ATAN2_YX_LREALGibt den Winkel φ der kartesischen Koordinaten (x,y) mit LREAL-Argumenten zurück
ATAN2_YX_LREAL gibt den Winkel j der kartesischen Koordinaten (x,y) innerhalb des Bereichs -π bis +π zurück.
Eingang
Kartesische Y-Koordinate
Kartesische X-Koordinate
Ausgang
Jede zweidimensionale Koordinatenposition P kann über die kartesischen Koordinaten P(x,y) oder die Polarkoordinaten P(r,j) (r = Radius, j = Winkel) festgelegt werden.

Legen Sie ATAN2_YX wie folgt fest:
ATAN2_YX(y,x) |
x |
y |
|---|---|---|
 |
x > 0 |
|
 |
x < 0 |
y ³ 0 |
 |
y < 0 |
|
 |
x = 0 |
y > 0 |
 |
y < 0 |
|
0 |
y = 0 |
Verwandte F-Befehle: F305_BATAN

Im POE-Kopf werden alle Ein- und Ausgangsvariablen deklariert, die für die Programmierung dieser Funktion verwendet werden. Für alle Programmiersprachen wird der gleiche POE-Kopf verwendet.
VAR
rPhi1Rad: REAL:=0.0;
rPhi2Rad: REAL:=0.0;
rPhi1Degree: REAL:=0.0;
rPhi2Degree: REAL:=0.0;
END_VAR VAR CONSTANT
DEGR_OF_RAD: REAL:=57.295779513082320876798154814105;
END_VAR
VAR
bCalculatePhi1: BOOL:=FALSE;
END_VAR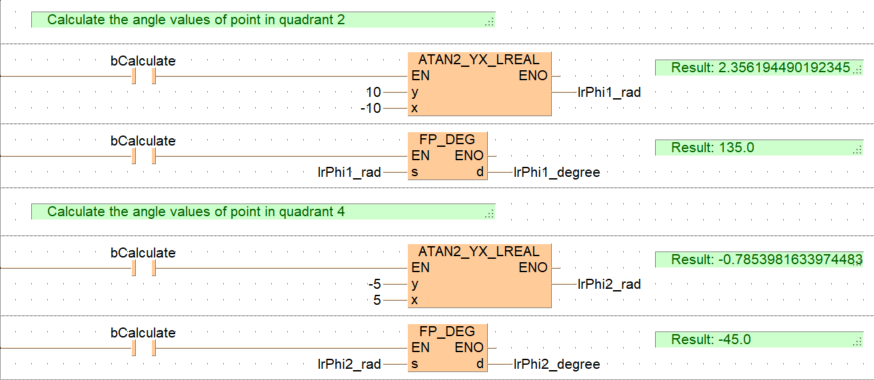
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 3 ;
NETWORK_BODY
B(B_COMMENT,,Calculate the angle values of point in quadrant 2,3,1,32,2,);
L(1,0,1,3);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 5 ;
NETWORK_BODY
B(B_COMMENT,,Result: 2.356194490192345,42,1,55,2,);
B(B_CONTACT,,bCalculate,9,1,11,3,);
B(B_F,E_ATAN2_YX_LREAL!,,26,0,36,5,,?DEN?Dy?Dx?AENO?C);
B(B_VARIN,,10,24,2,26,4,);
B(B_VAROUT,,lrPhi1_rad,36,2,38,4,);
B(B_VARIN,,-10,24,3,26,5,);
L(1,0,1,5);
L(1,2,9,2);
L(11,2,26,2);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 4 ;
NETWORK_BODY
B(B_COMMENT,,Result: 135.0,42,1,55,2,);
B(B_CONTACT,,bCalculate,9,1,11,3,);
B(B_F,FP_DEG!,,26,0,32,4,,?DEN?D@'s'?AENO?Cd);
B(B_VARIN,,lrPhi1_rad,24,2,26,4,);
B(B_VAROUT,,lrPhi1_degree,32,2,34,4,);
L(1,0,1,4);
L(1,2,9,2);
L(11,2,26,2);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 3 ;
NETWORK_BODY
B(B_COMMENT,,Calculate the angle values of point in quadrant 4,3,1,32,2,);
L(1,0,1,3);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 5 ;
NETWORK_BODY
B(B_COMMENT,,Result: -0.7853981633974483,42,1,55,2,);
B(B_CONTACT,,bCalculate,9,1,11,3,);
B(B_F,E_ATAN2_YX_LREAL!,,26,0,36,5,,?DEN?Dy?Dx?AENO?C);
B(B_VARIN,,-5,24,2,26,4,);
B(B_VAROUT,,lrPhi2_rad,36,2,38,4,);
B(B_VARIN,,5,24,3,26,5,);
L(1,0,1,5);
L(1,2,9,2);
L(11,2,26,2);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 4 ;
NETWORK_BODY
B(B_COMMENT,,Result: -45.0,42,1,55,2,);
B(B_CONTACT,,bCalculate,9,1,11,3,);
B(B_F,FP_DEG!,,26,0,32,4,,?DEN?D@'s'?AENO?Cd);
B(B_VARIN,,lrPhi2_rad,24,2,26,4,);
B(B_VAROUT,,lrPhi2_degree,32,2,34,4,);
L(1,0,1,4);
L(1,2,9,2);
L(11,2,26,2);
END_NETWORK_BODY
END_NET_WORK
END_BODY
//Calculate the angle values of point in quadrant 2
if (bCalculate) then
lrPhi1_rad := ATAN2_YX_LREAL(y := 10.0, x := -10.0); // Result: 2.356194490192345
FP_DEG(s := lrPhi1_rad, d => lrPhi1_degree); // Result: 135.0
end_if;
//Angle value of point in quadrant 4
if (bCalculate) then
lrPhi2_rad := ATAN2_YX_LREAL(y := -5.0, x := 5.0); // Result: -0.7853981633974483
FP_DEG(s := lrPhi2_rad, d => lrPhi2_degree); // Result: -45.0
end_if;