F355_PID_DUT
F355_PID_DUTInstrucción relacionada con el procesamiento PID
Esta instrucción de control PID se utiliza para regular un proceso (por ejemplo, un calentador) dando un valor medido (por ejemplo, temperatura) y un valor a la salida predeterminado (por ejemplo, 20°C).
Entrada
Para obtener una explicación detallada de los parámetros, consultar PID_DUT_31.
En lugar de utilizar esta instrucción F, se recomienda utilizar la instrucción FP7 correspondiente: FP_PID_BASIC
La función calcula un algoritmo PID cuyos parámetros se definen en una tabla en forma de un ARRAY con 30 elementos, que se introducen en la entrada s.
si la configuración de los parámetros está fuera del rango permitido
si la configuración de los parámetros está fuera del rango permitido
En la Lista de Variables Globales, se definen las variables a las que pueden acceder todas las POUs del proyecto.


Todas las variables de entrada y de salida utilizadas para la programación de esta función han sido declaradas en la Cabecera de la POU. Se utiliza la misma cabecera de la POU para todos los lenguajes de programación.
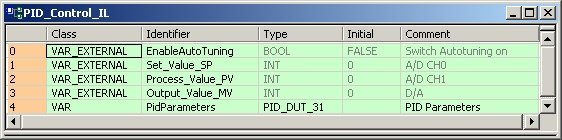
VAR_EXTERNAL
EnableAutoTuning: BOOL:=FALSE;
(*Switch Auto Tuning On *)
Set_Value_SP: WORD:=0;
(*A/D CH0*)
Process_Value_PV: WORD:=0;
(*A/D CH1*)
Output_Value_MV: WORD:=0;
(*D/A*)
END_VAR
VAR
PidParameters: PID_DUT_31;
(*PID Parameters*)
END_VAREn la inicialización de la variable PidParameters del tipo de datos PID_DUT_31, el límite superior de MV es 4000. La constante proporcional Kp se inicializa a 80 (8), Ti y Td a 200 (20s) y el ciclo de control Ts a 100 (1s).
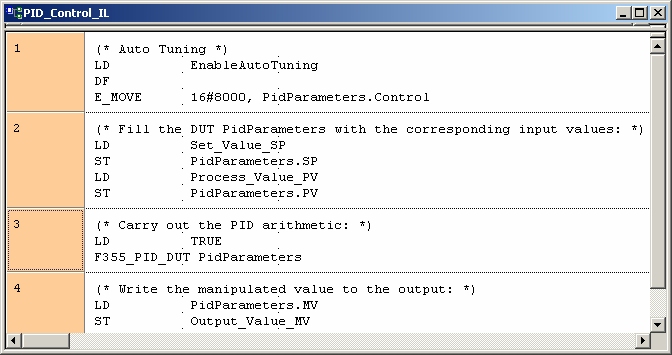
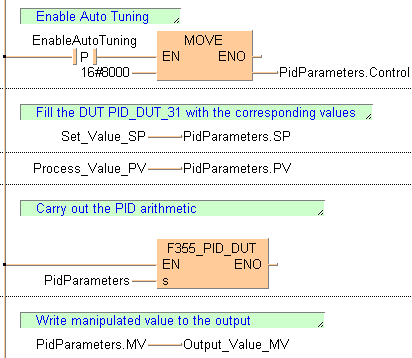
La función estándar MOVE copia el valor 16#8000 al elemento Control de la DUT PidParameters cuando la variable EnableAutoTuning pasa de FALSE a TRUE (es decir, cuando se activa el auto-tuning en la función F355_PID_DUT).
Las variables Set_Value_SP y Process_Value_PV se asignan a los elementos SP y PV de la DUT PidParameters. Estos reciben los valores desde los canales 0 y 1 del conversor A/D.
Puesto que el bloque de función F355_PID_DUT tiene una salida EN conectada directamente a la línea de conexión , la función se ejecuta cuando el PLC pasa a modo RUN. El valor de la salida calculada almacenada en el elemento MV de la DUT PidParameters es asignado a la variable Output_Value_MV. Este valor se devuelve a través del conversor D/A desde el PLC a la salida del sistema.
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 6 ;
NETWORK_BODY
B(B_F,E_MOVE,,10,2,17,6,,?DEN?Da_Num?AENO?C);
B(B_VAROUT,,PidParameters.Control,17,4,19,6,);
B(B_VARIN,,16#8000,8,4,10,6,);
B(B_CONTACT,,EnableAutoTuning,5,3,7,5,R);
B(B_COMMENT,,Enable Auto Tuning,2,1,12,2,);
L(1,4,5,4);
L(7,4,10,4);
L(1,0,1,6);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 4 ;
NETWORK_BODY
B(B_VARIN,,Set_Value_SP,9,2,11,4,);
B(B_VAROUT,,PidParameters.SP,11,2,13,4,);
B(B_COMMENT,,Fill the DUT PID_DUT_31 with the corresponding values,2,1,24,2,);
L(1,0,1,4);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 2 ;
NETWORK_BODY
B(B_VARIN,,Process_Value_PV,9,0,11,2,);
B(B_VAROUT,,PidParameters.PV,11,0,13,2,);
L(1,0,1,2);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 7 ;
NETWORK_BODY
B(B_VARIN,,PidParameters,8,5,10,7,);
B(B_F,F355_PID_DUT!,Instance,10,3,18,7,,?DEN?D@'s'?AENO);
B(B_COMMENT,,Carry out the PID arithmetic,2,1,21,2,);
L(1,5,10,5);
L(1,0,1,7);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 4 ;
NETWORK_BODY
B(B_VARIN,,PidParameters.MV,9,2,11,4,);
B(B_VAROUT,,Output_Value_MV,11,2,13,4,);
B(B_COMMENT,,Write manipulated value to the output,2,1,21,2,);
L(1,0,1,4);
END_NETWORK_BODY
END_NET_WORK
END_BODY(* Auto Tuning: *)
if DF(EnableAutoTuning) then
PidParameters.Control:=16#8000;
end_if;
(* Fill the DUT PidParameters with the corresponding input values: *)
PidParameters.SP:=Set_Value_SP;
PidParameters.PV:=Process_Value_PV;
(* Carry out the PID arithmetic: *)
F355_PID_DUT(PidParameters);
(* Write the manipulated value to the output: *)
Output_Value_MV:=PidParameters.MV;