


 PulseOutput_Jog_FB
PulseOutput_Jog_FBOperación de JOG
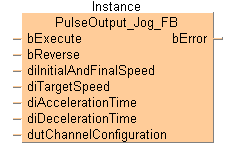
Entrada
La condición de ejecución puede ser:
en el flanco del trigger
permanente, si es necesario cambiar la velocidad
Dirección de desplazamiento: Hacia adelante = FALSE, Hacia atrás = TRUE
Velocidad inicial y final (F171_PulseOutput_Trapezoidal): 1 a 50000 (1Hz–50kHz)
Velocidad máxima: Establecer este valor conforme al rango de frecuencias seleccionado en PulseOutput_Channel_Configuration_DUT:
FPS, FP-X: 1 a 9800 (1,5Hz–9,8kHz)
48 a 100000 (48Hz–100kHz)
191 a 100000 (191–100kHz)
F171_PulseOutput_Trapezoidal: de 1 a 50000 (1Hz–50kHz)
FP0, F168_PulseOutput_Trapezoidal: 40 a 5000 (40Hz–5kHz)
Tiempo de aceleración (F171_PulseOutput_Trapezoidal): 1ms–32760ms (hasta la velocidad máxima)
Tiempo de deceleración (F171_PulseOutput_Trapezoidal): 1ms–32760ms (desde la velocidad máxima)
Salida
TRUE si un valor aplicado no es válido. Se detiene la ejecución del bloque de función.
Esta instrucción forma parte de las instrucciones Tool de salida de pulsos. Para obtener información más detallada sobre las instrucciones que utiliza internamente, consultar la:F172_PulseOutput_Jog.Utilizar PulseInfo_IsActive para comprobar si la bandera de control del canal seleccionado está a FALSE.
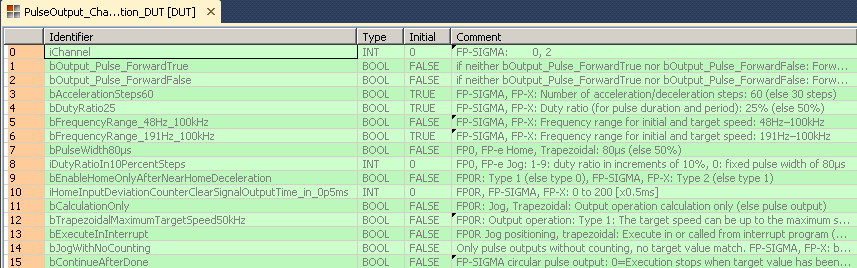
Con un Tipo de Datos Estructurados (DUT) se puede definir un tipo de dato compuesto por otros tipos de datos. Una DUT se define primero en el repositorio de DUTs y, seguidamente, se procesa como los tipos de datos estándar (BOOL, INT, etc.) en la lista de variables globales o la cabecera de la POU.

Todas las variables de entrada y de salida utilizadas para la programación de esta función han sido declaradas en la Cabecera de la POU. Se utiliza la misma cabecera de la POU para todos los lenguajes de programación.

VAR
PulseOutput_Jog: PulseOutput_Jog_FB;
bExecute: BOOL:=FALSE;
bReverse: BOOL:=FALSE;
ChannelConfiguration_DUT: PulseOutput_Channel_Configuration_DUT;
bError: BOOL:=FALSE;
bConfigureDUT: BOOL:=FALSE;
END_VAR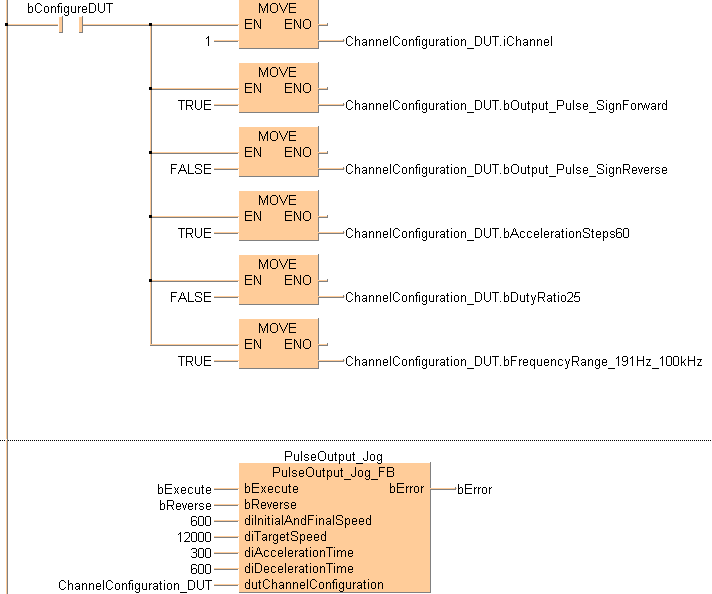
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 28 ;
NETWORK_BODY
B(B_CONTACT,,bConfigureDUT,4,1,6,3,);
B(B_F,E_MOVE!,,15,0,21,4,,?DEN?D?AENO?C);
B(B_VARIN,,1,13,2,15,4,);
B(B_F,E_MOVE!,,15,8,21,12,,?DEN?D?AENO?C);
B(B_VARIN,,FALSE,13,10,15,12,);
B(B_VAROUT,,ChannelConfiguration_DUT.bOutput_Pulse_SignReverse,21,10,23,12,);
B(B_F,E_MOVE!,,15,12,21,16,,?DEN?D?AENO?C);
B(B_F,E_MOVE!,,15,4,21,8,,?DEN?D?AENO?C);
B(B_VARIN,,TRUE,13,6,15,8,);
B(B_VAROUT,,ChannelConfiguration_DUT.bOutput_Pulse_SignForward,21,6,23,8,);
B(B_VARIN,,TRUE,13,14,15,16,);
B(B_VAROUT,,ChannelConfiguration_DUT.iChannel,21,2,23,4,);
B(B_F,E_MOVE!,,15,16,21,20,,?DEN?D?AENO?C);
B(B_VARIN,,FALSE,13,18,15,20,);
B(B_VAROUT,,ChannelConfiguration_DUT.bDutyRatio25,21,18,23,20,);
B(B_F,E_MOVE!,,15,20,21,24,,?DEN?D?AENO?C);
B(B_VAROUT,,ChannelConfiguration_DUT.bAccelerationSteps60,21,14,23,16,);
B(B_VAROUT,,ChannelConfiguration_DUT.bFrequencyRange_191Hz_100kHz,21,22,23,24,);
B(B_VARIN,,TRUE,13,22,15,24,);
L(6,2,10,2);
L(1,2,4,2);
L(10,2,15,2);
L(10,22,15,22);
L(10,18,15,18);
L(10,14,15,14);
L(10,10,15,10);
L(10,6,15,6);
L(10,2,10,22);
L(1,0,1,28);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 10 ;
NETWORK_BODY
B(B_FB,PulseOutput_Jog_FB!,PulseOutput_Jog,15,1,28,10,,?BbExecute?BbReverse?BdiInitialAndFinalSpeed?BdiTargetSpeed?BdiAccelerationTime?BdiDecelerationTime?BdutChannelConfiguration?AbError);
B(B_VARIN,,bExecute,13,2,15,4,);
B(B_VARIN,,bReverse,13,3,15,5,);
B(B_VARIN,,600,13,4,15,6,);
B(B_VARIN,,12000,13,5,15,7,);
B(B_VARIN,,300,13,6,15,8,);
B(B_VARIN,,600,13,7,15,9,);
B(B_VARIN,,ChannelConfiguration_DUT,13,8,15,10,);
B(B_VAROUT,,bError,28,2,30,4,);
L(1,0,1,10);
END_NETWORK_BODY
END_NET_WORK
END_BODY(* Used DUT parameters *)
ChannelConfiguration_DUT.iChannel := 1;
ChannelConfiguration_DUT.bOutput_Pulse_ForwardTrue := TRUE;
ChannelConfiguration_DUT.bOutput_Pulse_ForwardFalse := FALSE;
ChannelConfiguration_DUT.bAccelerationSteps60 := FALSE;
ChannelConfiguration_DUT.bDutyRatio25 := TRUE;
ChannelConfiguration_DUT.bFrequencyRange_191Hz_100kHz := TRUE;
ChannelConfiguration_DUT.bExecuteInInterrupt := FALSE;
(* FB *)
PulseOutput_Jog(bExecute := bExecute,
bReverse := bReverse,
diInitialAndFinalSpeed := 600,
diTargetSpeed := 12000,
diAccelerationTime := 300,
diDecelerationTime := 600,
dutChannelConfiguration := ChannelConfiguration_DUT,
bError => bError);