


 FP_READ_FROM_SLAVE
FP_READ_FROM_SLAVELeggere i dati dallo slave
Utilizzate questa istruzione per richiedere i dati da uno slave tramite la porta di comunicazione che utilizza il protocollo MEWTOCOL-COM o Modbus RTU, come definito nei registri di sistema della porta utilizzata. Assicuratevi di impostare lo stesso protocollo per master e slave. Master e slave devono avere area di memoria uguali. Se il dato dello slave non è disponibile nell'area utente del master, utilizzate FP_READ_FROM_SLAVE_AREA_OFFS o FP_MODBUS_MASTER.
Per le trasmissioni di dati con il protocollo Modbus, il compilatore genera comandi Modbus basati sui numeri di riferimento Modbus.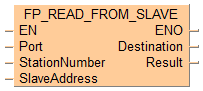
Ingresso
Specifica le porte di comunicazione (in base al tipo di PLC):
Porta COM p.es. SYS_COM0_PORT
Porta Ethernet p.es. SYS_ETHERNET_USER_CONNECTION_1
MCU/SCU p.es. 16#xx01 (xx = numero slot) in COM01
Numero della stazione dello slave (MEWTOCOL: 1–99, MODBUS: 1–247)
Impostato su 1 se una SYS_ETHERNET_USER_CONNECTION_xx è applicata all'ingresso Port
Indirizzo di origine sullo slave dal quale è richiesto il dato.
Uscita
Area word o registro sull'unità master in cui viene scritto il dato richiesto.
Solo per FP7: Per una descrizione di tutti i codici di errore, fare riferimento alla tabella dei codici di errore di comunicazione Modbus/MEWTOCOL.
Per gli altri PLC: impostato su 0

Durante l'invio: Flag di invio della comunicazione master è TRUE
Invio effettuato: Flag di invio della comunicazione master è FALSE
Completamento normale: FALSE
Completamento anomalo: TRUE
se l'area specificata utilizzando il registro indice eccede il limite.
se i dati slave o master eccedono l'intervallo di indirizzi disponibili.
se la modalità di comunicazione non è impostata su MEWTOCOL-COM Master/Slave o su Modbus RTU Master/Slave.
se la porta COM selezionata richiede un cassetto di comunicazione che non è stato installato.
se l'area specificata utilizzando il registro indice eccede il limite.
se i dati slave o master eccedono l'intervallo di indirizzi disponibili.
se la modalità di comunicazione non è impostata su MEWTOCOL-COM Master/Slave o su Modbus RTU Master/Slave.
se la porta COM selezionata richiede un cassetto di comunicazione che non è stato installato.
Nella lista variabili globali si definiscono variabili alle quali possono accedere tutti i POU del progetto.


Tutte le variabili di ingresso e uscita utilizzate per programmare questa funzione sono state dichiarate nell'intestazione del POU. La stessa intestazione del POU è utilizzata per tutti i linguaggi di programmazione.

VAR_EXTERNAL
g_Peripherie_SlaveResult_Address: ARRAY[0..9] OF REAL:=[10(0)];
END_VAR
VAR
bReadResult: BOOL:=FALSE;
wReadFromSlaveResult: WORD:=0;
(*result of write to slave instruction*)
iSlaveStationNumber: INT:=0;
(*slave station number*)
arrResults: ARRAY [0..9] OF REAL:=[10(0.0)];
(*Array of results to be read from slave station*)
iSlaveMemoryArea: INT:=5;
(*memory Area in slave station*)
iSlaveMemoryOffset: INT:=100;
iSlaveMemorySize: INT:=1;
END_VAR
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 8 ;
NETWORK_BODY
B(B_VARIN,,SYS_COM1_PORT,19,2,21,4,);
B(B_VARIN,,iSlaveStationNumber,19,3,21,5,);
B(B_CONTACT,,bReadResult,8,1,10,3,);
B(B_VAROUT,,wReadFromSlaveResult,38,3,40,5,);
B(B_VAROUT,,arrResults,38,2,40,4,);
B(B_F,FP_READ_FROM_SLAVE!,,21,0,33,6,,?DEN?DnPort?DStationNumber?DSlaveAddress?AENO?CDestination?CResult);
B(B_VARIN,,g_Peripherie_SlaveResult_Address,19,4,21,6,);
L(1,2,8,2);
L(10,2,21,2);
L(33,3,38,3);
L(33,4,38,4);
L(1,0,1,8);
END_NETWORK_BODY
END_NET_WORK
END_BODYif (bReadResult) then
FP_READ_FROM_SLAVE(Port := SYS_COM1_PORT, StationNumber := iSlaveStationNumber,
SlaveAddress := g_Peripherie_SlaveResult_Address, Destination => arrResults[0],
Result => wReadFromSlaveResult);
end_if;