


 PulseOutput_Jog_FB
PulseOutput_Jog_FBTipp-Betrieb
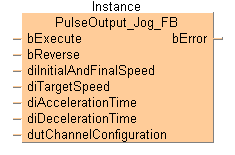
Eingang
Die Ausführungsbedingung kann sein:
mit Flankentrigger
dauerhaft, wenn eine Änderung der Geschwindigkeit erforderlich ist
Bewegungsrichtung: Vorwärts = FALSE, Rückwärts = TRUE
Anfangs- und Restgeschwindigkeit (F171_PulseOutput_Trapezoidal): 1 bis 50000 (1Hz–50kHz)
Sollgeschwindigkeit: Setzen Sie diesen Wert gemäß dem in PulseOutput_Channel_Configuration_DUT festgelegten Frequenzbereich:
FPS, FP-X: 1 bis 9800 (1,5Hz–9,8kHz)
48 bis 100000 (48Hz–100kHz)
191 bis 100000 (191–100kHz)
F171_PulseOutput_Trapezoidal: 1 bis 50000 (1Hz–50kHz)
FP0, F168_PulseOutput_Trapezoidal: 40 bis 5000 (40Hz–5kHz)
Beschleunigungszeit (F171_PulseOutput_Trapezoidal): 1ms–32760ms (bis zur maximalen Geschwindigkeit)
Bremszeit (F171_PulseOutput_Trapezoidal): 1ms–32760ms (ab der maximalen Geschwindigkeit)
Ausgang
TRUE, wenn ein zugewiesener Eingangswert falsch ist. Der Funktionsbaustein wird nicht weiter ausgeführt.
Dieser Nicht-Inline-Befehl ist Teil der Tool-Befehle für die Pulsausgabe. Eine ausführliche Beschreibung der intern verwendeten Befehle finden Sie in der :F172_PulseOutput_Jog.Prüfen Sie mit PulseInfo_IsActive, ob der Kontrollmerker für den gewählten Kanal FALSE ist.
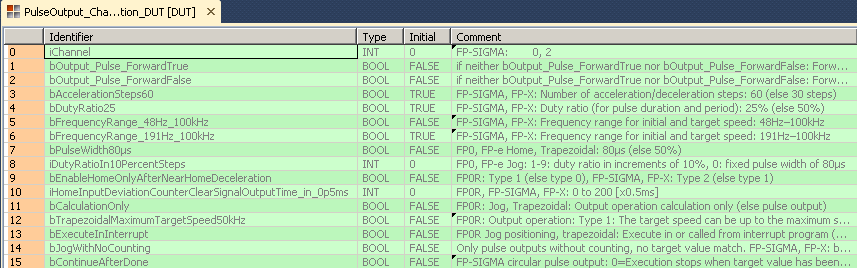
Mit einem strukturierten Datentyp (SDT) können zusammengesetzte Datentypen definiert werden. Ein SDT wird zunächst im SDT-Pool angelegt und dann wie die Standardtypen (BOOL, INT usw.) in der globalen Variablenliste oder im POE-Kopf verarbeitet.

Im POE-Kopf werden alle Ein- und Ausgangsvariablen deklariert, die für die Programmierung dieser Funktion verwendet werden. Für alle Programmiersprachen wird der gleiche POE-Kopf verwendet.

VAR
PulseOutput_Jog: PulseOutput_Jog_FB;
bExecute: BOOL:=FALSE;
bReverse: BOOL:=FALSE;
ChannelConfiguration_DUT: PulseOutput_Channel_Configuration_DUT;
bError: BOOL:=FALSE;
bConfigureDUT: BOOL:=FALSE;
END_VAR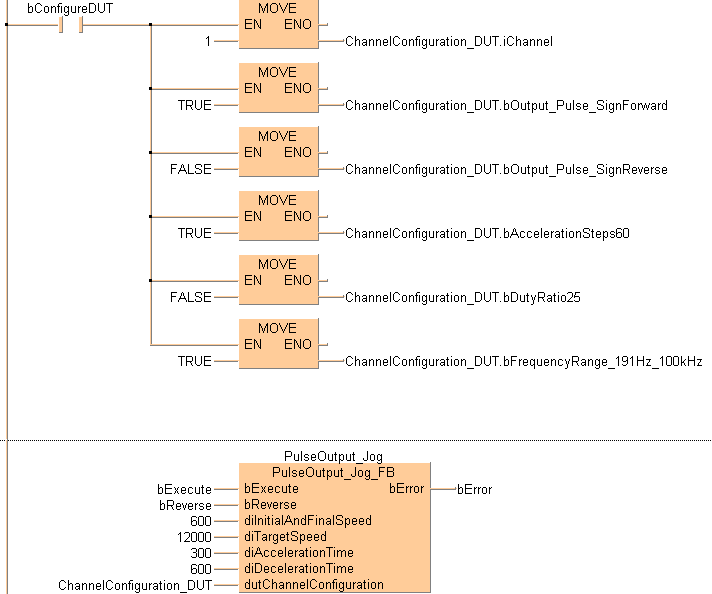
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 28 ;
NETWORK_BODY
B(B_CONTACT,,bConfigureDUT,4,1,6,3,);
B(B_F,E_MOVE!,,15,0,21,4,,?DEN?D?AENO?C);
B(B_VARIN,,1,13,2,15,4,);
B(B_F,E_MOVE!,,15,8,21,12,,?DEN?D?AENO?C);
B(B_VARIN,,FALSE,13,10,15,12,);
B(B_VAROUT,,ChannelConfiguration_DUT.bOutput_Pulse_SignReverse,21,10,23,12,);
B(B_F,E_MOVE!,,15,12,21,16,,?DEN?D?AENO?C);
B(B_F,E_MOVE!,,15,4,21,8,,?DEN?D?AENO?C);
B(B_VARIN,,TRUE,13,6,15,8,);
B(B_VAROUT,,ChannelConfiguration_DUT.bOutput_Pulse_SignForward,21,6,23,8,);
B(B_VARIN,,TRUE,13,14,15,16,);
B(B_VAROUT,,ChannelConfiguration_DUT.iChannel,21,2,23,4,);
B(B_F,E_MOVE!,,15,16,21,20,,?DEN?D?AENO?C);
B(B_VARIN,,FALSE,13,18,15,20,);
B(B_VAROUT,,ChannelConfiguration_DUT.bDutyRatio25,21,18,23,20,);
B(B_F,E_MOVE!,,15,20,21,24,,?DEN?D?AENO?C);
B(B_VAROUT,,ChannelConfiguration_DUT.bAccelerationSteps60,21,14,23,16,);
B(B_VAROUT,,ChannelConfiguration_DUT.bFrequencyRange_191Hz_100kHz,21,22,23,24,);
B(B_VARIN,,TRUE,13,22,15,24,);
L(6,2,10,2);
L(1,2,4,2);
L(10,2,15,2);
L(10,22,15,22);
L(10,18,15,18);
L(10,14,15,14);
L(10,10,15,10);
L(10,6,15,6);
L(10,2,10,22);
L(1,0,1,28);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 10 ;
NETWORK_BODY
B(B_FB,PulseOutput_Jog_FB!,PulseOutput_Jog,15,1,28,10,,?BbExecute?BbReverse?BdiInitialAndFinalSpeed?BdiTargetSpeed?BdiAccelerationTime?BdiDecelerationTime?BdutChannelConfiguration?AbError);
B(B_VARIN,,bExecute,13,2,15,4,);
B(B_VARIN,,bReverse,13,3,15,5,);
B(B_VARIN,,600,13,4,15,6,);
B(B_VARIN,,12000,13,5,15,7,);
B(B_VARIN,,300,13,6,15,8,);
B(B_VARIN,,600,13,7,15,9,);
B(B_VARIN,,ChannelConfiguration_DUT,13,8,15,10,);
B(B_VAROUT,,bError,28,2,30,4,);
L(1,0,1,10);
END_NETWORK_BODY
END_NET_WORK
END_BODY(* Used DUT parameters *)
ChannelConfiguration_DUT.iChannel := 1;
ChannelConfiguration_DUT.bOutput_Pulse_ForwardTrue := TRUE;
ChannelConfiguration_DUT.bOutput_Pulse_ForwardFalse := FALSE;
ChannelConfiguration_DUT.bAccelerationSteps60 := FALSE;
ChannelConfiguration_DUT.bDutyRatio25 := TRUE;
ChannelConfiguration_DUT.bFrequencyRange_191Hz_100kHz := TRUE;
ChannelConfiguration_DUT.bExecuteInInterrupt := FALSE;
(* FB *)
PulseOutput_Jog(bExecute := bExecute,
bReverse := bReverse,
diInitialAndFinalSpeed := 600,
diTargetSpeed := 12000,
diAccelerationTime := 300,
diDecelerationTime := 600,
dutChannelConfiguration := ChannelConfiguration_DUT,
bError => bError);