


 F168_PulseOutput_Home
F168_PulseOutput_HomeReferenzpunktfahrt
Anhand der Parameter im angegebenen strukturierten Datentyp wird eine Referenzpunktfahrt durchgeführt. Die Pulse werden vom angegebenen Kanal ausgegeben, wenn der Kontrollmerker für diesen Kanal FALSE und die Ausführungsbedingung TRUE ist.
Eingang
Anfangsadresse des Bereiches, der die Datentabelle enthält
Pulsausgang: 0 oder 1
Nach dem Einschalten des Antriebssystems besteht ein vorher nicht bestimmbarer Versatz zwischen dem internen Positionswert (Istwert) und der mechanischen Position der Achse. Zur Herstellung des Positionsbezuges muss der interne Wert mit dem realen Positionswert der Achse synchronisiert werden. Die Synchronisation erfolgt durch Übernahme eines Positionswertes an einem bekannten Punkt (Referenzpunkt). Bei der Ausführung eines Referenzpunktfahrtbefehls werden so lange Pulse ausgegeben, bis der Referenzpunkteingang aktiviert wird. Die E/A-Zuweisung richtet sich nach dem verwendeten Kanal. Zum Abbremsen im Referenzpunktbereich geben Sie einen Referenzpunkteingang an und setzen Bit 4 des Sonderdatenregisters, in dem der Steuercode für die Pulsausgabe gespeichert wird (sys_wHscOrPulseControlCode), auf TRUE und zurück auf FALSE. Während der Referenzpunktfahrt unterscheiden sich der Wert im Istwert-Speicherbereich und der tatsächliche Istwert. Wenn die Referenzpunktfahrt abgeschlossen ist, springt der Istwert auf 0.
Es gibt zwei verschiedene Betriebsarten:
Typ 1: Der Referenzpunkteingang wird aktiviert, unabhängig davon, ob ein Referenzpunkt-Sucheingang vorhanden ist, ob der Bremsvorgang bereits eingesetzt hat oder ob der Bremsvorgang abgeschlossen ist.
Ohne Referenzpunkt-Sucheingang:

Mit Referenzpunkt-Sucheingang:

Typ 2: Der Referenzpunkteingang kann nur aktiviert werden, nachdem der Bremsvorgang (ausgelöst durch einen Referenzpunkt-Sucheingang) abgeschlossen ist.

Im SDT lassen sich folgende Parameter festlegen: F168_PulseOutput_Home_DUT
Steuercode
Anfangs- und Restgeschwindigkeit
Sollgeschwindigkeit
Beschleunigungs-/Bremszeit
Ende der Pulsausgabe (fest)
Die Pulsausgabefrequenz ändert sich entsprechend der festgelegten Beschleunigungs- und Bremszeit.
Der Unterschied zwischen der Soll- und Anfangsgeschwindigkeit bestimmt die Steigung der Rampen..
Setzen Sie einen schnellen Zähler, der einem Pulsausgabekanal zugeordnet ist, in den Systemregistern auf "Unbenutzt".
Wenn Sie Programme im RUN-Modus bearbeiten, wird die Pulsausgabe gestoppt und erst nach der Übertragung der Programmänderungen fortgesetzt.
Der Kontrollmerker "Schneller Zähler" (z.B. sys_bIsHscChannel0ControlActive) und der Kontrollmerker "Pulsausgabe" (z.B. sys_bIsPulseChannel0Active) sind derselben Sondermerker-Nummer zugeordnet (z.B. R903A). Daher ist sowohl der Kontrollmerker für den schnellen Zähler (z.B. sys_bIsHscChannel0ControlActive) als auch der Kontrollmerker für die Pulsausgabe (z.B. sys_bIsPulseChannel0Active) für den betreffenden Kanal TRUE, wenn ein schneller Zählerbefehl oder ein Pulsausgabebefehl ausgeführt wird. Solange dieser Merker auf TRUE steht, kann kein anderer schneller Zählerbefehl oder Pulsausgabebefehl ausgeführt werden.
Selbst wenn der Referenzpunkt erreicht worden ist, werden Pulse ausgegeben, wenn dieser Befehls ausgeführt wird.
Wenn der Referenzpunkt-Sucheingang während der Beschleunigung aktiviert wird, beginnt der Bremsvorgang.
Wenn sowohl das Hauptprogramm als auch das Interrupt-Programm Code für denselben Kanal enthalten, dürfen die Programme nicht gleichzeitig ausgeführt werden.
Es ist unbedingt empfehlenswert, die Möglichkeit eines erzwungenen Stopps in Ihrem Positionierprogramm vorzusehen.
Der Status des Kontrollmerkers für den schnellen Zähler oder den Pulsausgang kann sich innerhalb eines Zyklus ändern.
Um die FP0R im FP0-Kompatibilitätsmodus auszuführen, können Sie ein FP0-Programm auf die FP0R übertragen Bitte beachten Sie folgende Beschränkungen:
Die FP0R unterstützt vorzeichenbehaftete 32-Bit-Daten für Ist- und Sollwerte; die FP0 unterstützt vorzeichenbehaftete 24-Bit-Daten. Auf der FP0 zählen Zähler und Pulsausgabe auch über den FP0-Bereich hinaus weiter.
Das Puls-Pausenverhältnis beträgt immer 25%, unabhängig von den Befehlseinstellungen. Bei der Verwendung der Methode Pulsausgabe/Richtungsanzeige werden die Pulse ca. 300ms nach der Ausgabe des Richtungsanzeigesignals ausgegeben; das Verhalten des Motorantriebs wird gleichzeitig berücksichtigt.
Die Einstellung "Nicht zählen" wird von der FP0R nicht unterstützt. Wenn bei FP0-Pulsausgabefehlen die Einstellung "Nicht zählen" gewählt wurde, interpretiert die FP0R dies als "Vorwärtszählen".
Die maximale Pulsausgangsfrequenz beträgt 10000Hz.
Stellen Sie sicher, dass der Pulsausgabebefehl keinen Ausgang verwendet, der als normaler Ausgang genutzt wird.
Um ein FP0-Programm im FP0-Kompatibilitätsmodus auszuführen, müssen die SPS-Typen (C10, C14, C16, C32 und T32) exakt übereinstimmen. Der Typ F32 der FP0R bietet keinen FP0-Kompatibilitätsmodus.
Kanäle und Pulsausgänge
| Kanal-Nr. | Pulsausgang | Pulsausgangsart |
0 |
Y0 |
Puls |
Y2 |
Richtung | |
1 |
Y1 |
Puls |
Y3 |
Richtung |
Systemvariablen für vorgesehene Speicherbereiche. Die Werte in Klammern gelten für die FP0 T32.
Beschreibung |
Systemvariable |
|
|---|---|---|
Pulsausgabe: Kontrollmerker für Kanal |
0 |
sys_bIsPulseChannel0Active |
1 |
sys_bIsPulseChannel1Active |
|
Pulsausgabe: Istwert für Kanal |
0 |
sys_diPulseChannel0ElapsedValue |
1 |
sys_diPulseChannel1ElapsedValue |
|
Pulsausgabe: Sollwert für Kanal |
0 |
sys_diPulseChannel0TargetValue |
1 |
sys_diPulseChannel1TargetValue |
|
Steuercode schneller Zähler und Pulsausgabe |
sys_wHscOrPulseControlCode |
|
| Kanal-Nr. | Referenzpunkteingang |
0 |
X0 |
1 |
X1 |

Im POE-Kopf werden alle Ein- und Ausgangsvariablen deklariert, die für die Programmierung dieser Funktion verwendet werden. Für alle Programmiersprachen wird der gleiche POE-Kopf verwendet.

VAR_EXTERNAL
X0_bMotorSwitch: BOOL:=FALSE;
(*at X0*)
END_VAR
VAR
dutHome: F168_PulseOutput_Home_DUT:=wControlCode := 16#102,
iInitialAndFinalSpeed := 0,
iTargetSpeed := 0,
iAccelerationAndDecelerationTime := 0;
iInitialAndFinalSpeed: INT:=3000;
iTargetSpeed: INT:=7000;
iAccelerationTime: INT:=300;
@'': @'';
END_VAR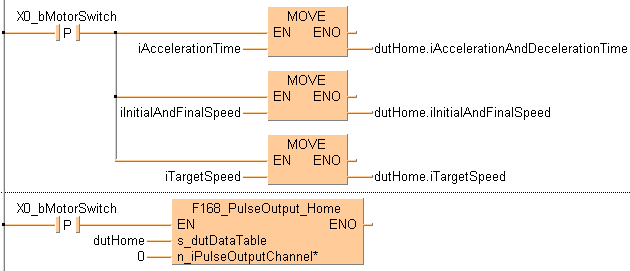
BODY
WORKSPACE
NETWORK_LIST_TYPE := NWTYPELD ;
ACTIVE_NETWORK := 0 ;
END_WORKSPACE
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 13 ;
NETWORK_BODY
B(B_CONTACT,,X0_bMotorSwitch,4,2,6,4,R);
B(B_F,E_MOVE!,Instance,17,1,23,5,,?DEN?D?AENO?C);
B(B_VAROUT,,dutHome.iAccelerationAndDecelerationTime,23,3,25,5,);
B(B_F,E_MOVE!,Instance,17,5,23,9,,?DEN?D?AENO?C);
B(B_VAROUT,,dutHome.iInitialAndFinalSpeed,23,7,25,9,);
B(B_F,E_MOVE!,Instance,17,9,23,13,,?DEN?D?AENO?C);
B(B_VAROUT,,dutHome.iTargetSpeed,23,11,25,13,);
B(B_VARIN,,iAccelerationTime,15,3,17,5,);
B(B_VARIN,,iInitialAndFinalSpeed,15,7,17,9,);
B(B_VARIN,,iTargetSpeed,15,11,17,13,);
L(1,3,4,3);
L(6,3,17,3);
L(8,3,8,11);
L(8,11,17,11);
L(8,7,17,7);
L(1,0,1,13);
END_NETWORK_BODY
END_NET_WORK
NET_WORK
NETWORK_TYPE := NWTYPELD ;
NETWORK_LABEL := ;
NETWORK_TITLE := ;
NETWORK_HEIGHT := 5 ;
NETWORK_BODY
B(B_CONTACT,,X0_bMotorSwitch,4,1,6,3,R);
B(B_F,F168_PulseOutput_Home!,Instance,11,0,24,5,,?DEN?Ds_dutDataTable?Hn_iPulseOutputChannel?AENO);
B(B_VARIN,,dutHome,9,2,11,4,);
B(B_VARIN,,0,9,3,11,5,);
L(1,2,4,2);
L(6,2,11,2);
L(1,0,1,5);
END_NETWORK_BODY
END_NET_WORK
END_BODYIF DF(X0_bMotorSwitch) then
dutHome.iInitialAndFinalSpeed:=iInitialAndFinalSpeed
dutHome.iTargetSpeed:=iTargetSpeed
dutHome.iAccelerationAndDecelerationTime:=iAccelerationTime
END_IF;
IF DF(X0_bMotorSwitch) then
F168_PulseOutput_Home(s_dutDataTable := dutHome,
n_iPulseOutputChannel :=0);
END_IF;